Planning and Control
Automated Driving Toolbox™ provides several features that support path planning and vehicle control.
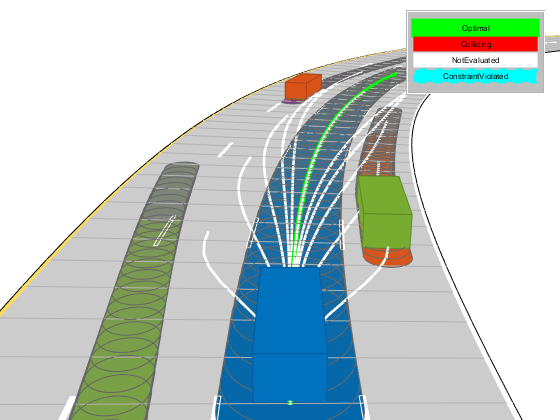
To plan driving paths, you can use a vehicle costmap and the optimal rapidly exploring random tree (RRT*) motion-planning algorithm. You can also check the validity of the path, smooth the path, and generate a velocity profile along the path.
To design vehicle control systems, you can use lateral and longitudinal controllers that enable autonomous vehicles to follow a planned trajectory.
Functions
Blocks
| Path Smoother Spline | Smooth vehicle path using cubic spline interpolation (Since R2019a) |
| Velocity Profiler | Generate velocity profile of vehicle path given kinematic constraints (Since R2019b) |
| Lateral Controller Stanley | Control steering angle of vehicle for path following by using Stanley method |
| Longitudinal Controller Stanley | Control longitudinal velocity of vehicle by using Stanley method (Since R2019a) |
Topics
- Lateral Control Tutorial
Control the steering angle of a vehicle following a planned path and perform lane changing.
- Code Generation for Path Planning and Vehicle Control
Generate C++ code for a path planning and vehicle control algorithm, and verify the code using software-in-the-loop simulation.
Featured Examples












You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)