Robotics and Autonomous Systems
Robotics and autonomous systems describe systems of platforms, such as automobiles, airplanes, robots, and UAVs, that move and operate in a physical environment for goal-oriented actions. With the tools and algorithms in multiple toolboxes, you can simulate, estimate, navigate, and control the platform states, such as its position and velocity, as well as monitor the physical environment. Specifically, you can:
Design, model, and simulate autonomous system scenarios that include platforms, trajectories, paths, sensors, and environment using various coordinate systems and maps.
Generate and classify detections, estimate platforms, and obtain various maps of the environment.
Plan the paths of robots, UAVs, and automobiles using different path planning algorithms based on varied motion characteristics.
Control robots, UAVs, and automobiles using multiple motion control algorithms and strategies.
Connect to robots and simulators through middleware (e.g. ROS) and deploy your designed estimation, navigation, and control algorithms on hardware.
Products for Robotics and Autonomous Systems
Topics
Scenario Design and Simulation
- Create Simple RoadRunner Scene (RoadRunner)
Use RoadRunner scene editing software to create a simple road network. - Create Driving Scenario Interactively and Generate Synthetic Sensor Data (Automated Driving Toolbox)
Use the Driving Scenario Designer app to create a driving scenario and generate sensor detections and point cloud data from the scenario. - Simulate Simple Flight Scenario and Sensor in Unreal Engine Environment (UAV Toolbox)
Visualize sensors in a simulation environment that uses Unreal Engine® from Epic Games®.
Simultaneous Localization and Mapping (SLAM)
- Build Map and Localize Using Segment Matching (Automated Driving Toolbox)
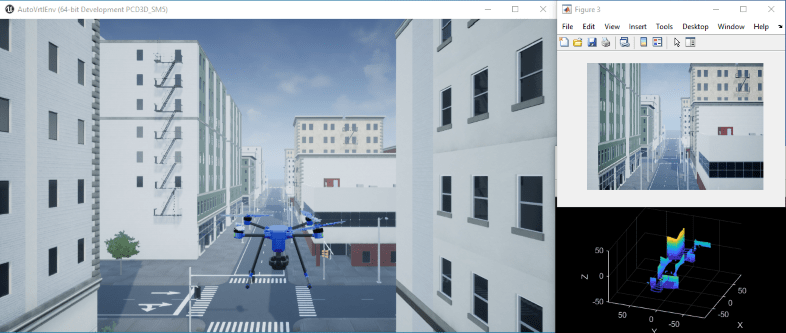
Build a map with lidar data and localize the position of a vehicle on the map usingSegMatch, a place recognition algorithm based on segment matching. - Stereo Visual SLAM for UAV Navigation in 3D Simulation (UAV Toolbox)
Generate a map for a city block scene in an Unreal Engine environment using stereo visual simultaneous localization and mapping. - Monocular Visual-Inertial Odometry Using Factor Graph (Navigation Toolbox)
Monocular visual-inertial odometry estimates the position and orientation of the robot using camera and inertial measurement unit (IMU) sensor data.
Situational Awareness and State Estimation
- Extended Object Tracking of Highway Vehicles with Radar and Camera (Sensor Fusion and Tracking Toolbox)
Track highway vehicles around an ego vehicle as extended objects that span multiple sensor resolution cells. - Visual-Inertial Odometry Using Synthetic Data (Sensor Fusion and Tracking Toolbox)
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera.
Motion Planning
- Design and Tune Controller for VTOL UAV (UAV Toolbox)
Use the controller templates to set up a vertical takeoff and landing (VTOL) UAV for flight missions. - Object Tracking and Motion Planning Using Frenet Reference Path (Sensor Fusion and Tracking Toolbox)
Dynamically plan the motion of an autonomous vehicle based on estimates of the surrounding environment. - Motion Planning with RRT for Fixed-Wing UAV (UAV Toolbox)
Plan the motion of a fixed-wing unmanned aerial vehicle (UAV) using the rapidly exploring random tree (RRT) algorithm given a start and goal pose on a 3-D map. - Gazebo Simulation of Semi-Structured Intelligent Bin Picking for UR5e Using YOLO and PCA-Based Object Detection (Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators)
This example shows detailed workflow for simulating intelligent bin picking using Universal Robots UR5e cobot in Gazebo.
Motion Control
- Highway Lane Following with RoadRunner Scene (Automated Driving Toolbox)
Simulate a highway lane following application using a scene created in the RoadRunner 3D scene editing tool. - Path Following with Obstacle Avoidance in Simulink® (Navigation Toolbox)
Use Simulink to avoid obstacles while following a path for a differential drive robot. - Control and Simulate Multiple Warehouse Robots (Robotics System Toolbox)
Control and simulate multiple robots working in a warehouse facility or distribution center.
Hardware Deployment
- Scenario Simulation and Flight Visualization with PX4 Hardware-in-the-Loop (HITL) and UAV Dynamics in Simulink (UAV Toolbox Support Package for PX4 Autopilots)
This example demonstrates 3D scenario Simulation and Flight visualization with PX4 Hardware-in-the-Loop (HITL) and UAV Dynamics contained in Simulink. - Estimating Orientation Using Inertial Sensor Fusion and MPU-9250 (Sensor Fusion and Tracking Toolbox)
Obtain data from an InvenSense MPU-9250 IMU sensor, and to use the 6-axis and 9-axis fusion algorithms in the sensor data to compute orientation of the device. - Sign Following Robot with ROS in MATLAB (ROS Toolbox)
Control a simulated robot running on a separate ROS-based simulator over a ROS network using MATLAB®. - Localize TurtleBot Using Monte Carlo Localization Algorithm (Navigation Toolbox)
Apply the Monte Carlo Localization algorithm on a TurtleBot® robot in a simulated Gazebo® environment.
Related Information
Featured Examples


You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)