Simulation 3D Camera


Libraries:
UAV Toolbox /
Simulation 3D
Automated Driving Toolbox /
Simulation 3D
Description
The Simulation 3D Camera block provides an interface to a camera with a lens in a 3D simulation environment. This environment is rendered using the Unreal Engine® from Epic Games®. The sensor is based on the ideal pinhole camera model, with a lens added to represent a full camera model, including lens distortion. This camera model supports a field of view of up to 150 degrees. For more details, see Algorithms.
If you set Sample time to -1, the block uses the
sample time specified in the Simulation 3D Scene
Configuration block. To use this sensor, you must include a Simulation 3D
Scene Configuration block in your model.
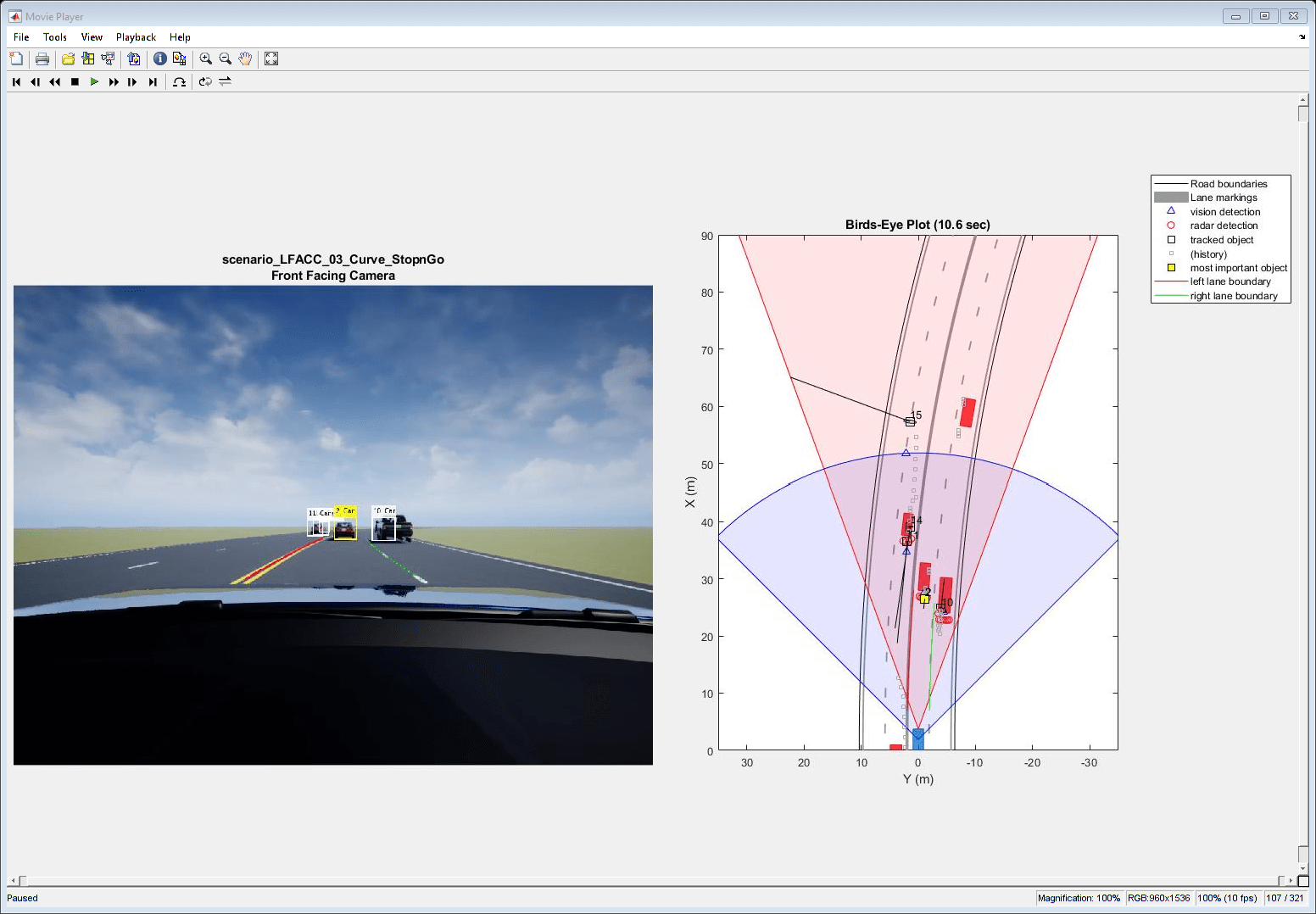
The block outputs images captured by the camera during simulation. You can use these images to visualize and verify your driving algorithms. In addition, on the Ground Truth tab, you can select options to output the ground truth data for developing depth estimation and semantic segmentation algorithms. You can also output the location and orientation of the camera in the world coordinate system of the scene. The image shows the block with all ports enabled.

The table summarizes the ports and how to enable them.
| Port | Description | Parameter for Enabling Port | Sample Visualization |
|---|---|---|---|
Image | Outputs an RGB image captured by the camera | n/a |
|
Depth | Outputs a depth map with values from 0 m to 1000 meters | Output depth |
|
Labels | Outputs a semantic segmentation map of label IDs that correspond to objects in the scene | Output semantic segmentation |
|
Location | Outputs the location of the camera in the world coordinate system | Output location (m) and orientation (rad) | n/a |
Orientation | Outputs the orientation of the camera in the world coordinate system | Output location (m) and orientation (rad) | n/a |



Note
The Simulation 3D Scene Configuration block must execute before the Simulation 3D Camera block. That way, the Unreal Engine 3D visualization environment prepares the data before the Simulation 3D Camera block receives it. To check the block execution order, right-click the blocks and select Properties. On the General tab, confirm these Priority settings:
Simulation 3D Scene Configuration —
0Simulation 3D Camera —
1
For more information about execution order, see How Unreal Engine Simulation for Automated Driving Works.
Examples


Ports
Input
Output
Parameters
Mounting
Sensor identifier — Unique sensor identifier
1 (default) | positive integer
Specify the unique identifier of the sensor. In a multisensor system, the sensor identifier enables you to distinguish between sensors. When you add a new sensor block to your model, the Sensor identifier of that block is N + 1, where N is the highest Sensor identifier value among the existing sensor blocks in the model.
Example: 2
Parent name — Name of parent vehicle
Scene Origin (default) | vehicle name
Name of the parent to which the sensor is mounted, specified as Scene
Origin or as the name of a vehicle in your model. The vehicle names
that you can select correspond to the Name parameters of the
simulation 3D vehicle blocks in your model. If you select Scene
Origin, the block places a sensor at the scene origin.
Example: SimulinkVehicle1
Mounting location — Sensor mounting location
Origin (default) | Front bumper | Rear bumper | Right mirror | Left mirror | Rearview mirror | Hood center | Roof center
Sensor mounting location.
When Parent name is
Scene Origin, the block mounts the sensor to the origin of the scene. You can set the Mounting location toOriginonly. During simulation, the sensor remains stationary.When Parent name is the name of a vehicle, the block mounts the sensor to one of the predefined mounting locations described in the table. During simulation, the sensor travels with the vehicle.
| Vehicle Mounting Location | Description | Orientation Relative to Vehicle Origin [Roll, Pitch, Yaw] (deg) |
|---|---|---|
Origin | Forward-facing sensor mounted to the vehicle origin, which is on the ground and at the geometric center of the vehicle (see Coordinate Systems for Unreal Engine Simulation in Automated Driving Toolbox)
| [0, 0, 0] |
Front bumper | Forward-facing sensor mounted to the front bumper
| [0, 0, 0] |
Rear bumper | Backward-facing sensor mounted to the rear bumper
| [0, 0, 180] |
Right mirror | Downward-facing sensor mounted to the right side-view mirror
| [0, –90, 0] |
Left mirror | Downward-facing sensor mounted to the left side-view mirror
| [0, –90, 0] |
Rearview mirror | Forward-facing sensor mounted to the rearview mirror, inside the vehicle
| [0, 0, 0] |
Hood center | Forward-facing sensor mounted to the center of the hood
| [0, 0, 0] |
Roof center | Forward-facing sensor mounted to the center of the roof
| [0, 0, 0] |
Roll, pitch, and yaw are clockwise-positive when looking in the positive direction of the X-axis, Y-axis, and Z-axis, respectively. When looking at a vehicle from above, the yaw angle (the orientation angle) is counterclockwise-positive because you are looking in the negative direction of the axis.
The X-Y-Z mounting location of the sensor relative to the vehicle depends on the vehicle type. To specify the vehicle type, use the Type parameter of the Simulation 3D Vehicle with Ground Following block to which you mount the sensor. To obtain the X-Y-Z mounting locations for a vehicle type, see the reference page for that vehicle.
To determine the location of the sensor in world coordinates, open the sensor block. Then, on the Ground Truth tab, select the Output location (m) and orientation (rad) parameter and inspect the data from the Location output port.
Specify offset — Specify offset from mounting location
off (default) | on
Select this parameter to specify an offset from the mounting location by using the Relative translation [X, Y, Z] (m) and Relative rotation [Roll, Pitch, Yaw] (deg) parameters.
Relative translation [X, Y, Z] (m) — Translation offset relative to mounting location
[0, 0, 0] (default) | real-valued 1-by-3 vector
Translation offset relative to the mounting location of the sensor, specified as a real-valued 1-by-3 vector of the form [X, Y, Z]. Units are in meters.
If you mount the sensor to a vehicle by setting Parent name to the name of that vehicle, then X, Y, and Z are in the vehicle coordinate system, where:
The X-axis points forward from the vehicle.
The Y-axis points to the left of the vehicle, as viewed when looking in the forward direction of the vehicle.
The Z-axis points up.
The origin is the mounting location specified in the Mounting location parameter. This origin is different from the vehicle origin, which is the geometric center of the vehicle.
If you mount the sensor to the scene origin by setting Parent
name to Scene Origin, then
X, Y, and Z are in
the world coordinates of the scene.
For more details about the vehicle and world coordinate systems, see Coordinate Systems for Unreal Engine Simulation in Automated Driving Toolbox.
Example: [0,0,0.01]
Adjust Relative Translation During Simulation
To adjust the relative translation of the sensor during simulation, enable the Translation input port by selecting the Input parameter next to the Relative translation [X, Y, Z] (m) parameter. When you enable the Translation port, the Relative translation [X, Y, Z] (m) parameter specifies the initial relative translation of the sensor and the Translation port specifies the relative translation of the sensor during simulation. For more details about the relative translation and rotation of this sensor, see Sensor Position Transformation.
Dependencies
To enable this parameter, select Specify offset.
Relative rotation [Roll, Pitch, Yaw] (deg) — Rotational offset relative to mounting location
[0, 0, 0] (default) | real-valued 1-by-3 vector
Rotational offset relative to the mounting location of the sensor, specified as a real-valued 1-by-3 vector of the form [Roll, Pitch, Yaw] . Roll, pitch, and yaw are the angles of rotation about the X-, Y-, and Z-axes, respectively. Units are in degrees.
If you mount the sensor to a vehicle by setting Parent name to the name of that vehicle, then X, Y, and Z are in the vehicle coordinate system, where:
The X-axis points forward from the vehicle.
The Y-axis points to the left of the vehicle, as viewed when looking in the forward direction of the vehicle.
The Z-axis points up.
Roll, pitch, and yaw are clockwise-positive when looking in the forward direction of the X-axis, Y-axis, and Z-axis, respectively. If you view a scene from a 2D top-down perspective, then the yaw angle (also called the orientation angle) is counterclockwise-positive because you are viewing the scene in the negative direction of the Z-axis.
The origin is the mounting location specified in the Mounting location parameter. This origin is different from the vehicle origin, which is the geometric center of the vehicle.
If you mount the sensor to the scene origin by setting Parent
name to Scene Origin, then
X, Y, and Z are in
the world coordinates of the scene.
For more details about the vehicle and world coordinate systems, see Coordinate Systems for Unreal Engine Simulation in Automated Driving Toolbox.
Example: [0,0,10]
Adjust Relative Rotation During Simulation
To adjust the relative rotation of the sensor during simulation, enable the Rotation input port by selecting the Input parameter next to the Relative rotation [Roll, Pitch, Yaw] (deg) parameter. When you enable the Rotation port, the Relative rotation [Roll, Pitch, Yaw] (deg) parameter specifies the initial relative rotation of the sensor and the Rotation port specifies the relative rotation of the sensor during simulation. For more details about the relative translation and rotation of this sensor, see Sensor Position Transformation.
Dependencies
To enable this parameter, select Specify offset.
Sample time — Sample time
-1 (default) | positive scalar
Sample time of the block, in seconds, specified as a positive scalar. The 3D simulation environment frame rate is the inverse of the sample time.
If you set the sample time to -1, the block inherits its sample time from
the Simulation 3D Scene Configuration block.
Parameters
These intrinsic camera parameters are equivalent to the properties of a cameraIntrinsics object. To obtain the intrinsic parameters for your camera, use
the Camera Calibrator app.
For details about the camera calibration process, see Using the Single Camera Calibrator App and What Is Camera Calibration?.
Focal length (pixels) — Focal length of camera
[1109, 1109] (default) | 1-by-2 positive integer vector
Specify the focal length of the camera as a 1-by-2 positive integer vector of the form [fx, fy]. Units are in pixels.
fx = F × sx
fy = F × sy
where:
F is the focal length in world units, typically millimeters.
[sx, sy] are the number of pixels per world unit in the x and y direction, respectively.
This parameter is equivalent to the FocalLength
property of a cameraIntrinsics object.
Optical center (pixels) — Optical center of camera
[640, 360] (default) | 1-by-2 positive integer vector
Specify the optical center of the camera as a 1-by-2 positive integer vector of the form [cx,cy]. Units are in pixels.
This parameter is equivalent to the PrincipalPoint property of a cameraIntrinsics
object.
Image size (pixels) — Image size produced by camera
[720, 1280] (default) | 1-by-2 positive integer vector
Specify the image size produced by the camera as a 1-by-2 positive integer vector
of the form [mrows,ncols]. Units are in pixels.
The maximum image size that you can specify is [1080,1920].
This parameter is equivalent to the ImageSize
property of a cameraIntrinsics object.
Radial distortion coefficients — Radial distortion coefficients
[0, 0] (default) | real-valued 2-element vector | real-valued 3-element vector | real-valued 6-element vector
Specify the radial distortion coefficients as a real-valued 2-element, 3-element, or 6-element vector. Radial distortion is the displacement of image points along radial lines extending from the principal point.
As image points move away from the principal point (positive radial displacement), image magnification decreases and a pincushion-shaped distortion occurs on the image.
As image points move toward the principal point (negative radial displacement), image magnification increases and a barrel-shaped distortion occurs on the image.
The camera sensor calculates the (xd,yd) radial-distorted location of a point using a two-coefficient, three-coefficient, or six-coefficient formula. This table shows the various formulas, where:
(x,y) = undistorted pixel locations
k1,k2,k3,k4,k5,k6 = radial distortion coefficients of the lens
r2 = x2 + y2
| Coefficients | Formula | Description |
[k1, k2] | xd = x(1 + k1r2 + k2r4) yd = y(1 + k1r2 + k2r4) | This model is equivalent to the two-coefficient model used by the RadialDistortion property of a cameraIntrinsics object. |
[k1, k2, k3] | xd = x(1 + k1r2 + k2r4 + k3r6) yd = y(1 + k1r2 + k2r4 + k3r6) | This model is equivalent to the three-coefficient model used by the RadialDistortion property of a cameraIntrinsics object. |
[k1, k2, k3, k4, k5, k6] | The six-coefficient model is based on the OpenCV radial distortion model. Note The Camera Calibrator app does not support this model. To calibrate a camera using this model, see Camera Calibration and 3D Reconstruction in the OpenCV documentation. |
Tangential distortion coefficients — Tangential distortion coefficients
[0, 0] (default) | real-valued 2-element vector
Specify the tangential distortion coefficients as a real-valued 2-element vector. Tangential distortion occurs when the lens and the image plane are not parallel.

The camera sensor calculates the tangential distorted location of a point, (xd, yd), using this formula:
xd = x + [2p1xy + p2 × (r2 + 2x2)]
yd = y + [p1 × (r2 + 2y2) + 2p2xy]
where:
x, y = undistorted pixel locations
p1, p2 = tangential distortion coefficients of the lens
r2 = x2 + y2
The undistorted pixel locations appear in normalized image coordinates, with the origin at the optical center. The coordinates are expressed in world units.
This parameter is equivalent to the TangentialDistortion property of a cameraIntrinsics object.
Axis skew — Skew angle of camera axes
0 (default) | nonnegative real-valued scalar
Specify the skew angle of the camera axes as a nonnegative real-valued scalar. If
the X-axis and Y-axis are exactly
perpendicular, then the skew must be 0. Units are
dimensionless.
This parameter is equivalent to the Skew property of a
cameraIntrinsics object.
Ground Truth
Output depth — Output depth map
off (default) | on
Select this parameter to output a depth map at the Depth port.
Output semantic segmentation — Output semantic segmentation map of label IDs
off (default) | on
Select this parameter to output a semantic segmentation map of label IDs at the Labels port.
Output location (m) and orientation (rad) — Output location and orientation of sensor
off (default) | on
Select this parameter to output the location and orientation of the sensor at the Location and Orientation ports, respectively.
Tips
To visualize the camera images that are output by the Image port, use a Video Viewer or To Video Display block.
To learn how to visualize the depth and semantic segmentation maps that are output by the Depth and Labels ports, see the Depth and Semantic Segmentation Visualization Using Unreal Engine Simulation example.
To understand how to set tag of Sim 3d Scene Cap and how it the tag is related to the block, see Place Cameras on Actors in the Unreal Editor (Vehicle Dynamics Blockset).
Because the Unreal Engine can take a long time to start between simulations, consider logging the signals that the sensors output. You can then use this data to develop perception algorithms in MATLAB®. See Mark Signals for Logging (Simulink).
You can also save image data as a video by using a To Multimedia File block. For an example of this setup, see Design Lane Marker Detector Using Unreal Engine Simulation Environment.
Algorithms
References
[1] Bouguet, J. Y. Camera Calibration Toolbox for Matlab. http://www.vision.caltech.edu/bouguetj/calib_doc
[2] Zhang, Z. "A Flexible New Technique for Camera Calibration." IEEE Transactions on Pattern Analysis and Machine Intelligence. Vol. 22, No. 11, 2000, pp. 1330–1334.
[3] Heikkila, J., and O. Silven. “A Four-step Camera Calibration Procedure with Implicit Image Correction.” IEEE International Conference on Computer Vision and Pattern Recognition. 1997.
Version History
Introduced in R2019b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)