ROS 2 Network Access
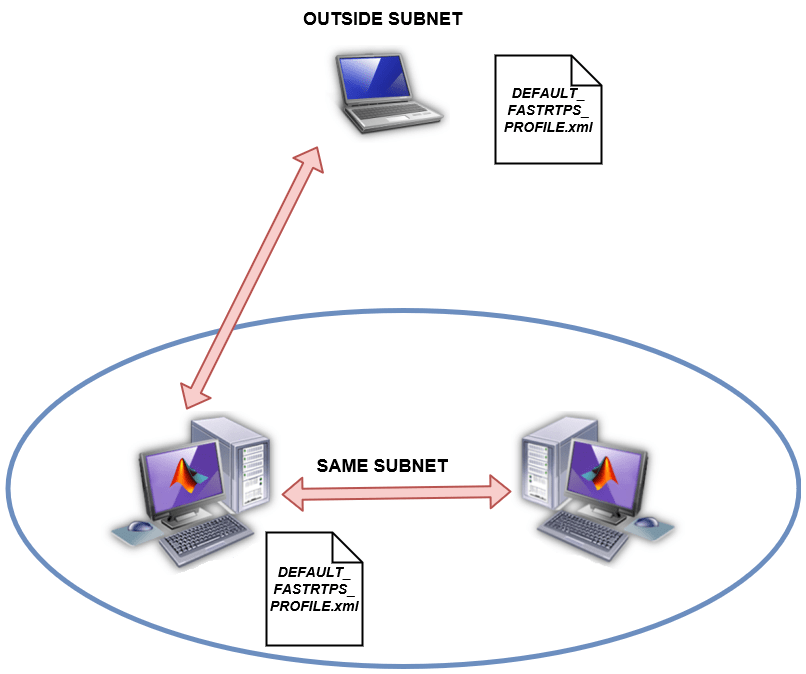
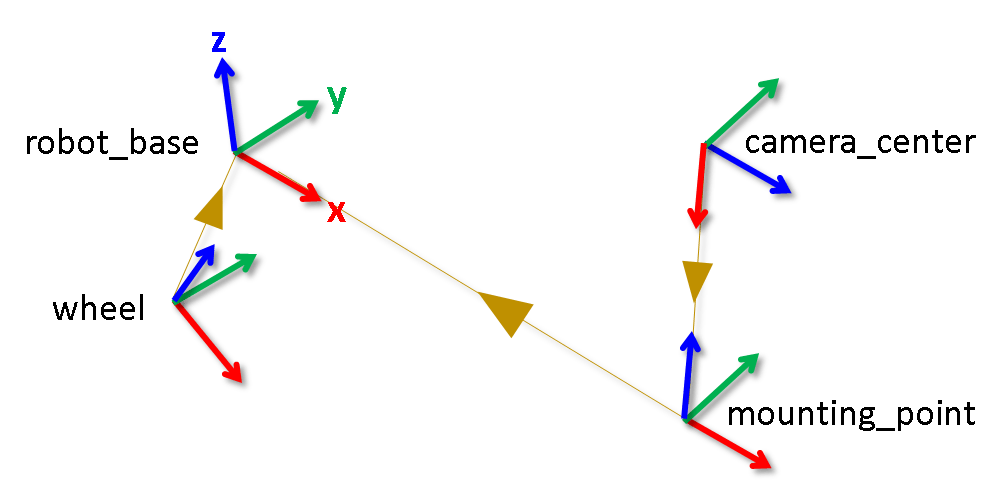
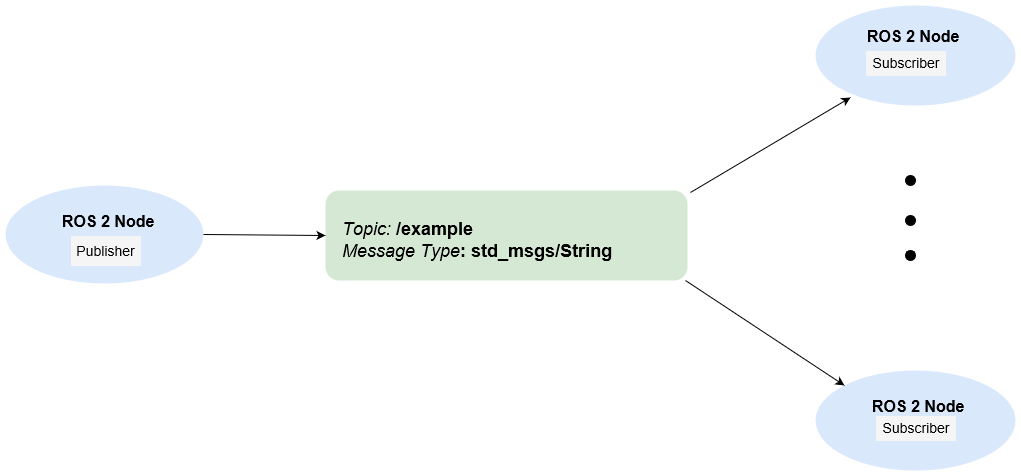
ROS Toolbox provides an interface to connect to existing ROS 2 networks, or create ROS 2 networks for desktop simulation and hardware interface with MATLAB and Simulink. You can create or access ROS 2 nodes and establish communication between them using subscribers and publishers. You can also create or access ROS 2 parameters and transformations on the network. For more information about ROS 2 nodes, see Connect to a ROS 2 Network.
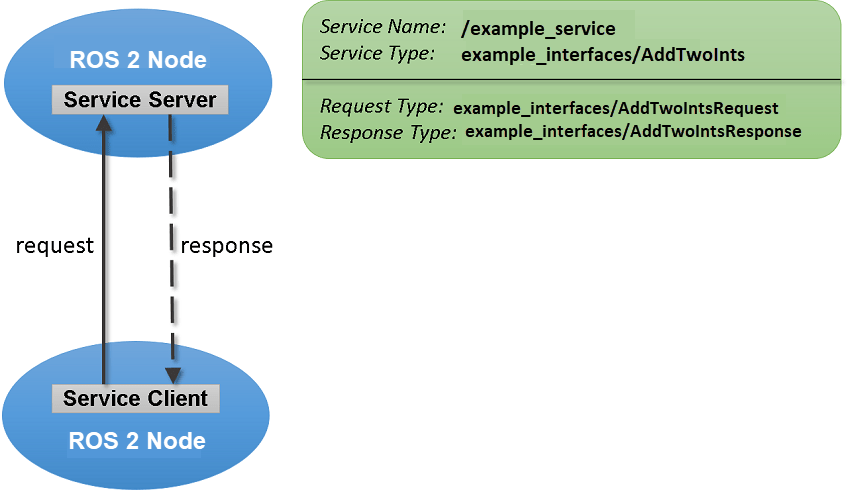
You can create or access ROS 2 service servers that can receive requests from service clients to perform tasks and provide responses. For more information about ROS 2 services, see Call and Provide ROS 2 Services.
You can also create and access ROS 2 action servers that can receive goal execution request from action clients, and provide feedback during the goal execution process.
Categories
- ROS 2 Network Connection and Exploration
Set up and interact with ROS 2 Networks
- ROS 2 Network Access in MATLAB
Access ROS 2 networks and messages using MATLAB
- ROS 2 Network Access in Simulink
Access ROS 2 networks and messages using Simulink
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)