ROS Network Access
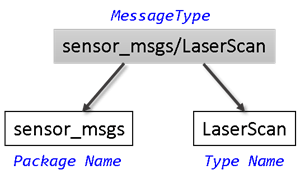
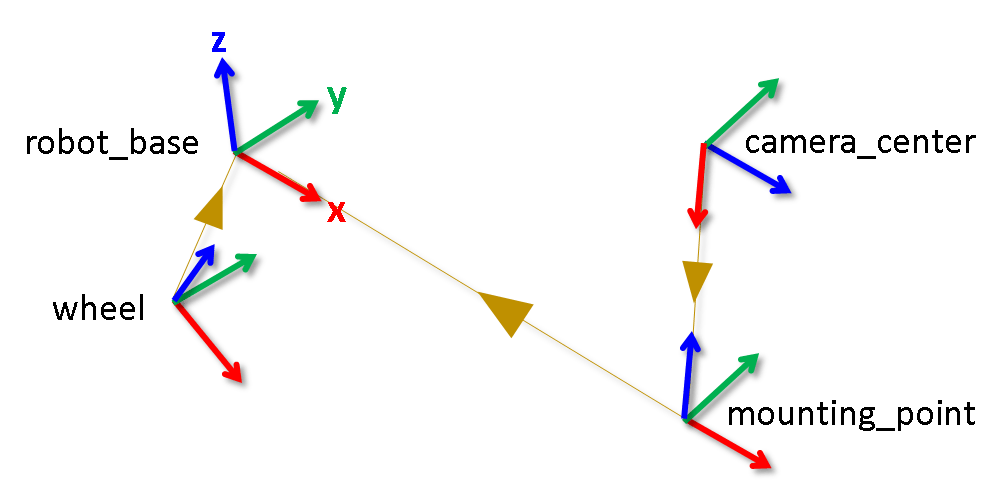
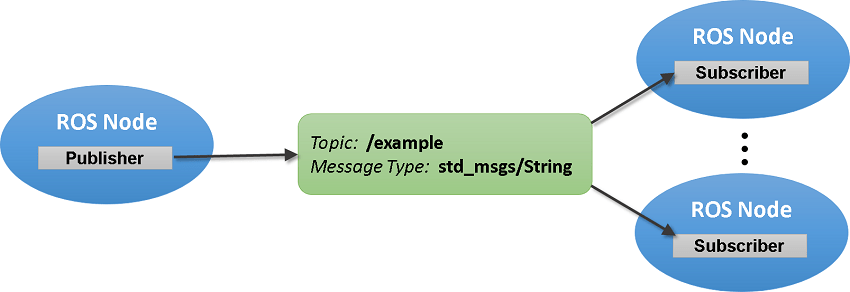
ROS Toolbox provides an interface to connect to existing ROS networks, or create ROS networks for desktop simulation and hardware interface with MATLAB and Simulink. You can create or access ROS nodes and establish communication between them using subscribers and publishers. You can also create or access ROS parameters and transformations on the network. For more information about ROS nodes, see Connect to a ROS Network.
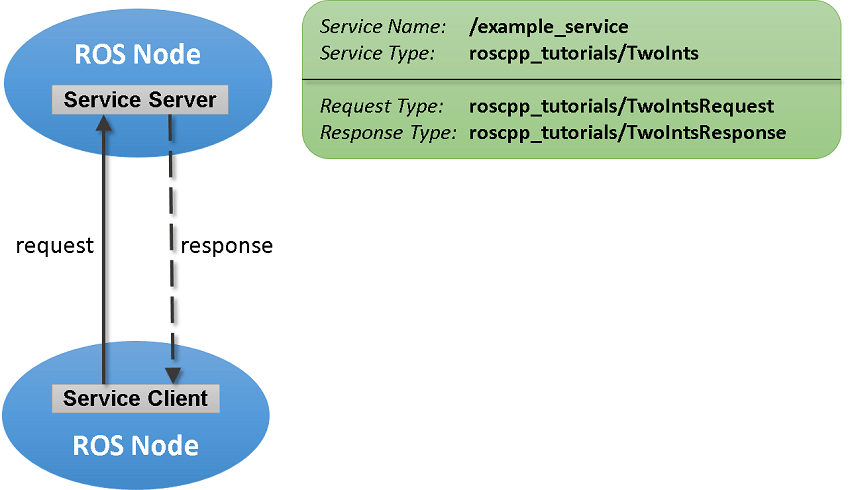
You can create or access ROS service servers that can receive requests from service clients to perform tasks and provide responses. For more information about ROS services, see Call and Provide ROS Services.
You can also create and access ROS action servers that can receive goal execution request from action clients, and provide feedback during the goal execution process. For more information about ROS actions, see ROS Actions Overview.
Categories
- ROS Network Connection and Exploration
Set up and interact with ROS networks
- ROS Network Access in MATLAB
Access ROS networks and messages using MATLAB
- ROS Network Access in Simulink
Access ROS networks and messages using Simulink
Featured Examples

You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)