Motion Planning
Use motion planning to plan a path through an environment. You can use common sampling-based planners like RRT, RRT*, and Hybrid A*, or specify your own customizable path-planning interfaces. Use path metrics, state space sampling, and state validation to ensure your path is valid and has proper obstacle clearance or smoothness. Follow your path and avoid obstacles using pure pursuit, vector field histogram (VFH), and timed elastic band (TEB) algorithms.
Functions
Blocks
| Pure Pursuit | Linear and angular velocity control commands (Since R2019b) |
| Vector Field Histogram | Avoid obstacles using vector field histogram (Since R2019b) |
Concepts
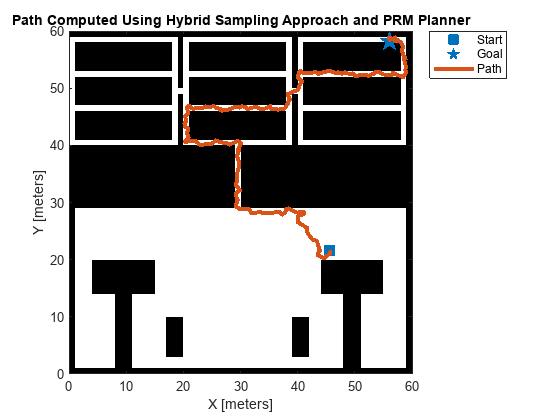
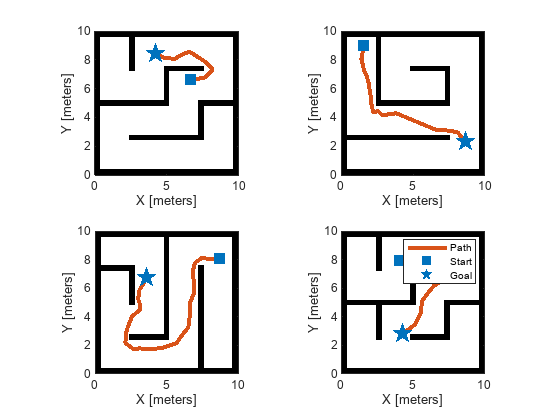
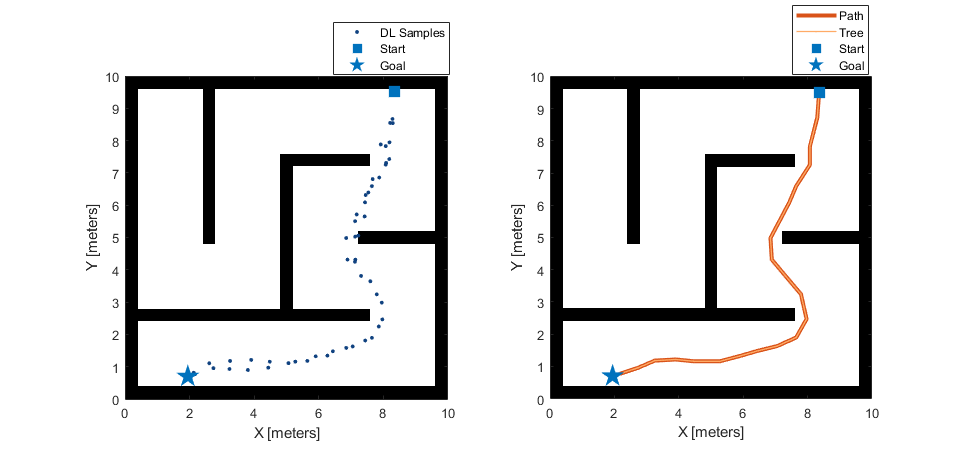
- Get Started with Motion Planning Networks
Motion Planning Networks for state space sampling.
Examples and How To
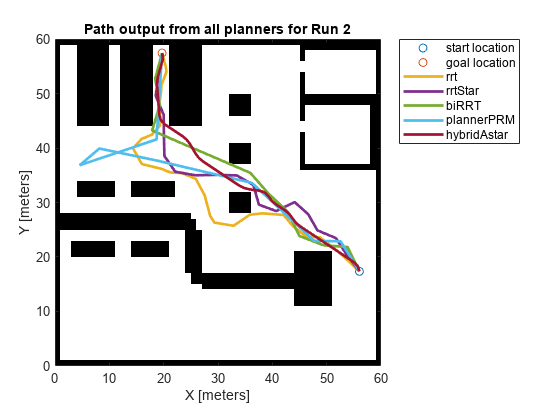
- Choose Path Planning Algorithms for Navigation
Details about the benefits of different path and motion planning algorithms.
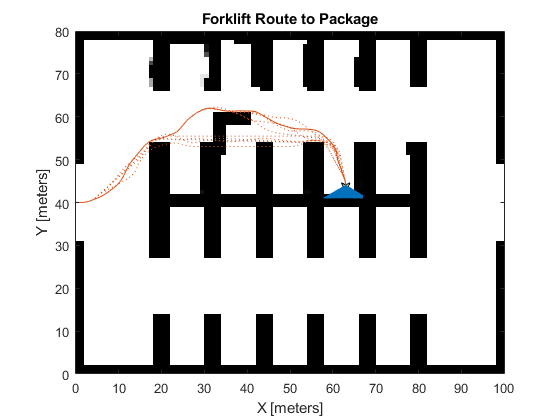
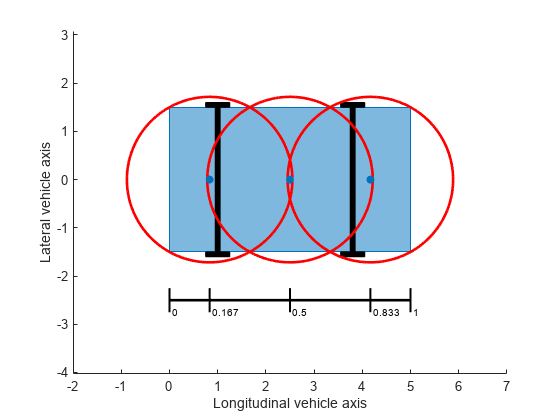
- Moving Furniture in a Cluttered Room with RRT
This example shows how to plan a path to move bulky furniture in a tight space avoiding poles.
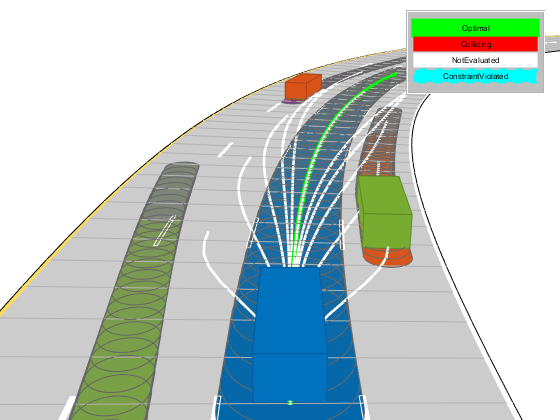
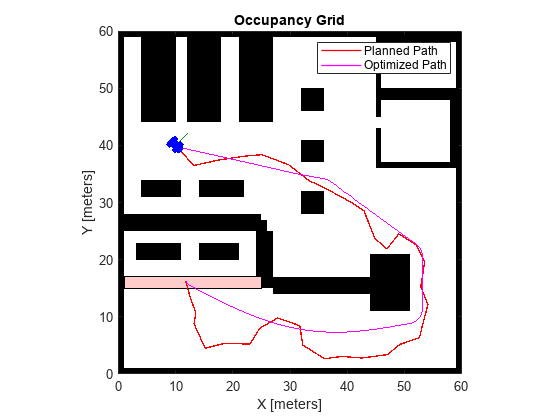
- Optimal Trajectory Generation for Urban Driving
This example shows how to perform dynamic replanning in an urban scenario using
trajectoryOptimalFrenet. - Motion Planning in Urban Environments Using Dynamic Occupancy Grid Map
This example shows you how to perform dynamic replanning in an urban driving scene using a Frenet reference path.
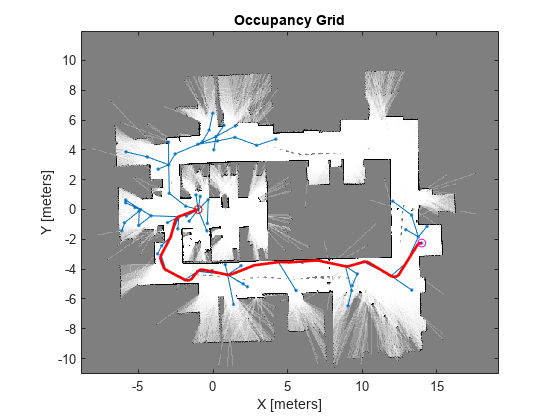
- Path Following with Obstacle Avoidance in Simulink®
Use Simulink to avoid obstacles while following a path for a differential drive robot.
- Obstacle Avoidance with TurtleBot and VFH
This example shows how to use ROS Toolbox and a TurtleBot® with vector field histograms (VFH) to perform obstacle avoidance when driving a robot in an environment.
- Vector Field Histogram
VFH algorithm details and tunable properties.
- Pure Pursuit Controller
Pure Pursuit Controller functionality and algorithm details.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)