Introduction to Track-To-Track Fusion
Track-To-Track Fusion Versus Central-Level Tracking
A multiple sensor tracking system can provide better performance than a single sensor system because it can provide broader coverage and better visibility. Moreover, fusing detections from different types of sensors can also improve the quality and accuracy of the target estimates. Two types of architecture are commonly used in a multiple sensor tracking system. In the first type of architecture — central-level tracking — the detections from all the sensors are sent directly to a tracking system that maintains tracks based on all the detections. Theoretically, the central-level tracking architecture can achieve the best performance because it can fully use all the information contained in the detections. However, you can also apply a hierarchical structure with sensor-level tracking combined with track-level fusion for a multiple sensor system. The figure shows a typical central-level tracking system and a typical track-to-track fusion system based on sensor-level tracking and track-level fusion.
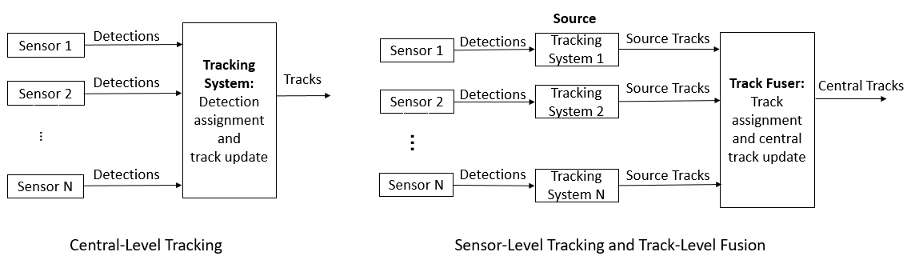
To represent each element in a track-to-track fusion system, call tracking systems that output tracks to a fuser as sources, and call the outputted tracks from sources as source tracks or local tracks. Call the tracks maintained in the fuser as central tracks.
Benefits and Challenges of Track-To-Track Fusion
In some cases, a track-to-track fusion architecture may be preferable to a central-level tracking architecture. These cases include:
In many applications, a tracking system not only needs to track targets in its environment for self-navigation, but also needs to transfer its maintained tracks to surrounding tracking systems for better overall navigation performance. For example, an autonomous vehicle that tracks its own situational environment can also share the maintained tracks with other vehicles to facilitate their navigation.
In practice, many sensors directly output tracks instead of detections. Therefore, to combine information from sensors that output tracks, the track-level fusion is required.
When communication bandwidth is limited, transmitting a track list is often more efficient than transmitting a set of detections. This can be particularly important for cases in which the track list is provided at a reduced rate relative to the scan rate.
When the number of sensors and detections is large, the computation complexity for the centralized tracking system can be high, especially for detection assignment. The track-to-track fusion architecture can distribute some assignment and estimation workloads to the sensor-level tracking, which reduces the computation complexity of the fuser.
Despite all the advantages favoring the track-to-track fusion architecture, it also poses additional complexity and challenges to the tracking system. Unlike detections, which can be assumed to be conditionally independent, the track estimates from each source are correlated with each other because they share a common prediction error resulting from a common process model. Therefore, computing a fused track using a standard filtering approach might lead to incorrect results. The following effects must be considered:
Common process noise — Since the sensors observe and track the same target, they share some common dynamics. As a result, target maneuvering can lead to a mean error that is common to all sensors.
Time-correlated measurement noise — If the track fusion is repeated over time, the standard Kalman filter assumption that measurements are not correlated over time is violated, because the sensor-level track state estimation errors are correlated over time.
Track Fuser and Tracking Architecture
You can use the trackFuser in Sensor Fusion and Tracking Toolbox™ for the purpose of track-to-track fusion. The trackFuser
System object™ provides two algorithms to combine source tracks considering the
correction effects between different tracks. You can choose the algorithm by specifying
the StateFusion property of trackFuser as:
'Cross'— Uses the cross-covariance fusion algorithm.'Intersection'— Uses the covariance intersection fusion algorithm.
You can also customize your own fusion algorithm.
Other than the standard track-to-track fusion architecture shown in the preceding
figure, you can also use other types of architectures with trackFuser.
For example, the following figure illustrates a two-vehicle tracking system.
On each vehicle, two sensors track the nearby targets with associated trackers. Each vehicle also has a fuser that fuses source tracks from two trackers. Fuser 6 can transmit its maintained central tracks to Fuser 3. With this architecture, Vehicle 1 can possibly identify targets (Target 2 in the figure) that are not within the field of view of its own sensors.
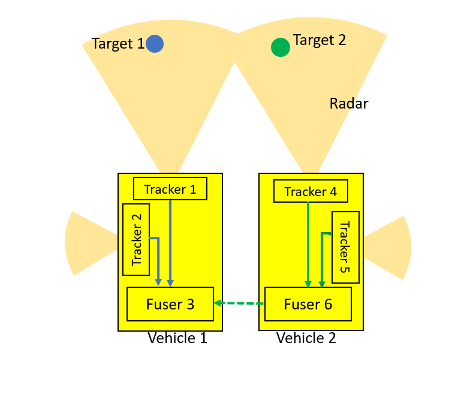
To reduce rumor propagation, you can treat the source tracks from Fuser 6 to Fuser 3
as external by specifying the IsInternalSource property of fuserSourceConfiguration as false when setting up the
SourceConfigurations property of TrackFuser.
Since tracks reported by different trackers can be expressed in different coordinate
frames, you need to specify the coordinate transformation between a source and a fuser
by specifying the fuserSourceConfiguration property.
See Also
trackFuser | fuserSourceConfiguration | trackerGNN | trackerJPDA | trackerTOMHT | trackerPHD
References
[1] Chong, C. Y., S. Mori, W. H. Barker, and K. C. Chang. "Architectures and Algorithms for Track Association and Fusion." IEEE Aerospace and Electronic Systems Magazine, Vol. 15, No. 1, 2000, pp. 5 – 13.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)