Structure from Motion and Visual SLAM
Stereo vision, triangulation, 3-D reconstruction, and visual simultaneous
localization and mapping (vSLAM)
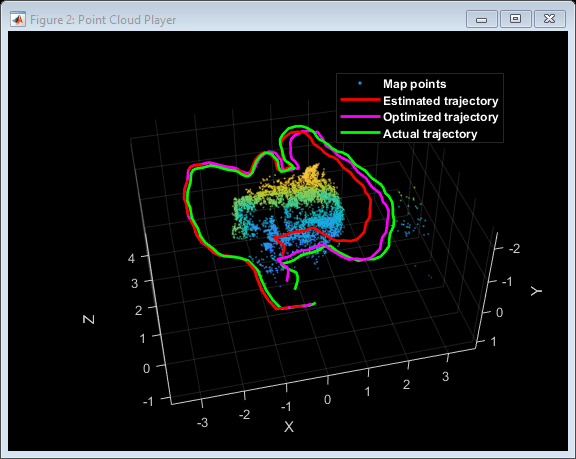
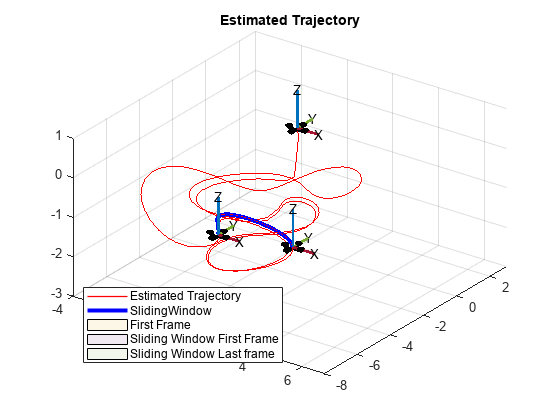
Stereo vision is the process of recovering depth from camera images by comparing two or more views of the same scene. Structure from Motion (SfM) is the process of estimating the 3-D structure of a scene from a set of 2-D images. Visual simultaneous localization and mapping (vSLAM) is the process of calculating the position and orientation of a camera, with respect to its surroundings, while simultaneously mapping the environment. For more details, see Implement Visual SLAM in MATLAB and Structure from Motion Overview.
Categories
- Stereo Vision
Stereo rectification, disparity, and dense 3-D reconstruction
- Structure from Motion
3-D reconstruction from multiple views
- vSLAM
Monocular, stereo, and RGB-D visual simultaneous localization and mapping (vSLAM)
Featured Examples








You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)