Van der Pol Oscillator
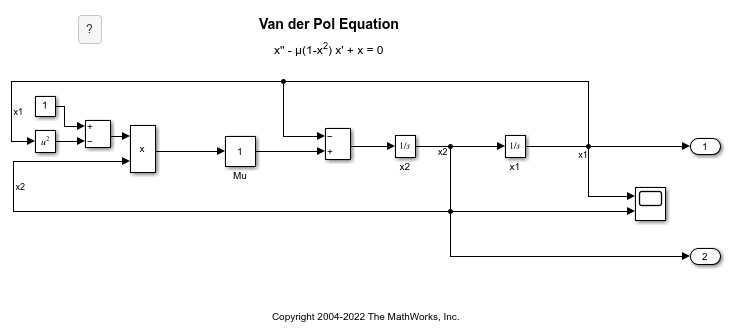
This example shows how to model the second-order Van der Pol (VDP) differential equation in Simulink®. In dynamics, the VDP oscillator is non-conservative and has nonlinear damping. At high amplitudes, the oscillator dissipates energy. At low amplitudes, the oscillator generates energy. The oscillator is given by this second-order differential equation:

where:
x is position as a function of time.
Mu is damping.
The VDP oscillator is used in physical and biological sciences, including electric circuits.
open_system('vdp');
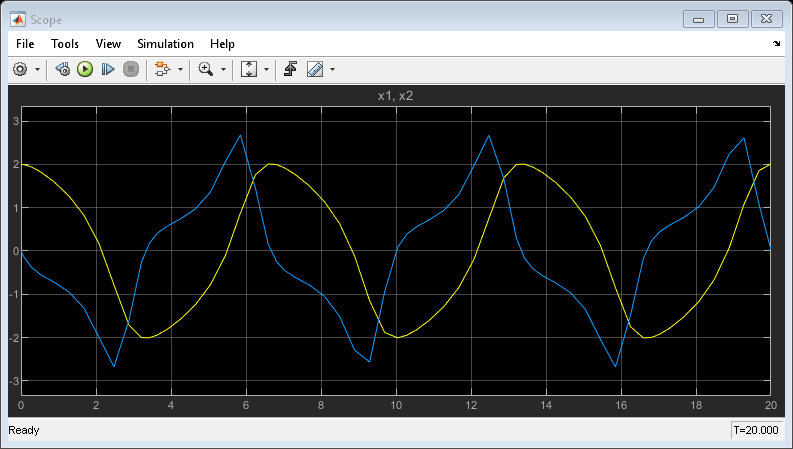
Simulate with Mu = 1
When Mu = 1, the VDP oscillator has nonlinear damping.
set_param('vdp/Mu','Gain','1') sim('vdp'); open_system('vdp/Scope');
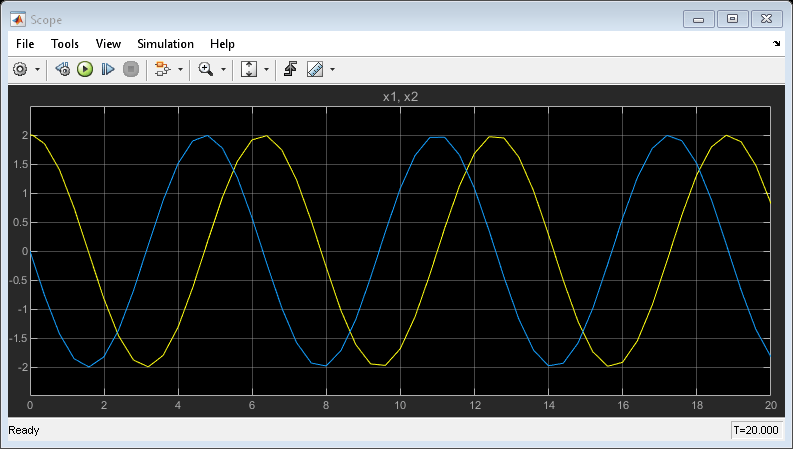
Simulate with Mu = 0
When Mu = 0, the VDP oscillator has no damping. Energy is conserved in this simple harmonic oscillator. The equation becomes:

set_param('vdp/Mu','Gain','0') sim('vdp'); open_system('vdp/Scope');
See Also
Related Examples
- Real-Time Van der Pol Simulation (Simulink Desktop Real-Time)
More About
References
[1] Cartwbight, M. L. "Balthazar Van Der Pol." Journal of the London Mathematical Society. Wiley. s1 35 (July 1960): 367–376. https://doi:10.1112/jlms/s1-35.3.367.
[2] Hirsch, Morris W., Stephen Smale, Robert L. Devaney, and Morris W. Hirsch. Differential Equations, Dynamical Systems, and an Introduction to Chaos. 2nd Ed. San Diego: Academic Press, 2004.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)