In this two-part video we will show you how to design and analyze linear and nonlinear systems in Simulink using transfer functions.
Let's start by looking at different ways of modeling transfer functions in Simulink. For example, K over s plus K. You can bring in transfer function objects defined in the MATLAB workspace into Simulink by using the LTI System block and specifying the variable name.
A transfer function can also be represented in terms of simple blocks, such as integrators and gains, as shown. Alternatively, you can use the Transfer Function block Simulink provides. The block is defined in terms of the numerator and denominator of the transfer function.
We have covered designing the given actuator engine system in a video about representing transfer functions in MATLAB. Let's model the same system in Simulink.
Simulink allows you to easily represent complex systems visually, in terms of their components and connections. Here we represent the actuator and the engine using the transfer function block and connect them in series. We then create an area the two blocks to denote their relationship.
Simulink allows us to easily simulate a given system for a variety of inputs by simply adding the appropriate source to the input dominant. Here we specify a ramp input and attach a scope, and the system's output dominant.
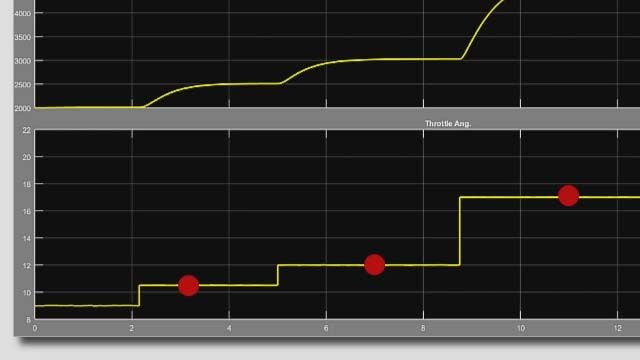
Click the Play button to run the simulation and view the scope to see how the output and the ramp input change over time. Design the simulation with a different input; just change the input block. Let's see a step input with magnitude equal to 1. Click the Play button to see how the output changes.
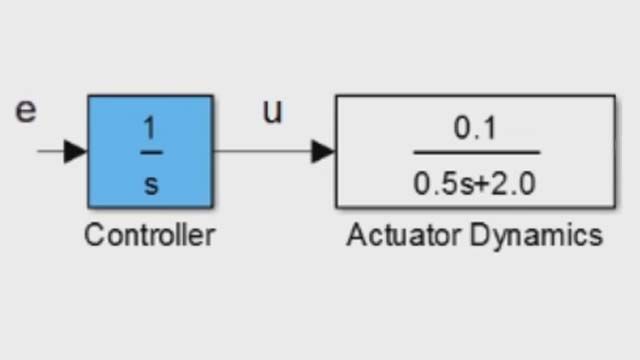
Now let's add a controller to the system. Designing a controller for the system using MATLAB was covered in the video previously mentioned. For now, let's assume that the addition of an integrator with gain equal to 10 and a feedback loop gives us the performance characteristics we desire.
The controllers transfer function is implemented using the transfer function block, which is what we use to represent the engine and the actuator as well. We can see that the model is able to follow step inputs with some overshoot and zero steady-state error.
We can design controllers and perform other common tasks directly in Simulink using Simulink controller design.
In part two of this video, we will be focusing on obtaining transfer functions from Simulink models.