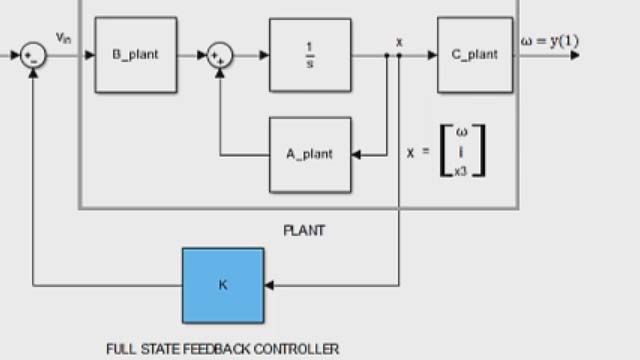
In this video, we will see how to create, manipulate, and analyze state-based systems in MATLAB and Control System Toolbox. Let us build a state space model of a DC motor where the applied voltage V is the input, the shaft speed omega is the output, and the current, I, and shaft speed, omega, are the two states. The motor parameters have already been defined in the base work space. So let's start by building our state based matrices.
Now we use the SS command on the state space matrices to create the state space model of the motor. Now that we have developed a state space model of the motor, let's add a voltage amplifier represented by the following first order transfer function that amplifies the input voltage. This amplifier provides a steady state voltage gain of five and a bandwidth of 1,000 radians per second.
Now that we have designed a voltage amplifier, let's create our overall plant model by combining the motor and amplifier using the star operator. This shows how with control system toolbox, we can easily combine and convert between models with different representations like state space and transfer functions. For example, the combination of these two models results in a third order state space model.
Now that we have developed our plant model, let us analyze our plant stability by calculating the poles or eigenvalues of the plant using the pull function, which returns negative real values, indicating a stable plant. Instead of calculating poles with the pole function, we could also have used the is stable function to analyze stability. This function returns a logical one if the system is stable or zero if unstable.
Now that we have determined that our plant is stable, let us analyze the step response for a unit step voltage applied using the step function. From the transient system characteristics, we see that the system takes a little over one second to rise and takes over two seconds to settle. So now we have seen how to create, manipulate, and analyze state space systems in MATLAB and Control System Toolbox. In the next video in this series on state space systems, we will design a full state feedback controller for our plant to show how state space models can be utilized in control design. This concludes the video.