Dynamical System Viewer
sysViewer Dynamical system graphical interface.
h = sysViewer(oPar, cPar, fcn, typ) builds a GUI for viewing the
effects of parameter changes on a one- or two-dimensional dynamical
system.
oPar and cPar are two-column cell arrays that define the order
parameter and control parameter(s), respectively. The first column
contains parameter names (strings to be typeset in latex). The second
column contains 1x2 vectors of parameter's range. This vector defines
plot axes limits for the order parameter and slider limits for the
control parameters.
The system is defined by the function handle fcn. For one-dimensional
systems, this should be a function with two inputs and one output. The
first input is system state, which will be a scalar in a one-
dimensional system. The second input is a vector of control parameter
values. The output of fcn can be either the rate of change of the order
parameter (in which case fcn is the flow equation), or the system
potential (in which case fcn is the potential function). Which function
is supplied can be indicated by the last input typ, one of the strings
'flow' or 'potential'. If typ is empty or omitted, 'flow' is the
default.
For two-dimensional systems defined with a flow, fcn should be a cell
array containing two function handles, each outputting the rate of
change along one dimension. Each function should take three inputs; the
first two are scalar values of the order parameters, the third is a
vector of control parameters. For two-dimensional systems defined with
a potential, fcn should take inputs as above and output a scalar.
The output h is a struct containing handles to the graphics objects in
the GUI. Intended only for advanced tweaking or troubleshooting.
sysViewer(..., defs) initializes the parameter sliders with the default
values in vector defs.
sysViewer(..., 'vectorize') speeds up computation for functions that
cannot be evaluated with a vector. In fact, any number of trailing
arguments will be passed to chebfun. See CHEBFUN for more options
(CHEBFUN2 and CHEBFUN2V for two-dimensional options).
--------
Examples:
------
One-dimensional
---
sysViewer({'\phi' [-pi pi]}, ...
{'b/a' [0 1]; '\Delta\omega' [-2 2]}, ...
@(x,c) c(2)*x-cos(x)-c(1)*cos(2*x), ...
'potential');
sysViewer({'\phi' [-pi pi]}, ...
{'b/a' [0 1]; '\Delta\omega' [-2 2]}, ...
@(x,c) c(2)-sin(x)-2*c(1)*sin(2*x), ...
'flow');
sysViewer({'\phi' [-pi pi]}, ...
{'b/a' [0 1]; '\Delta\omega' [-2 2]; 'c' [0 .5]; 'd' [0 .5]}, ...
@(x,c) c(2)*x-cos(x)-c(1)*cos(2*x)+c(3)*sin(x)+c(4)*sin(2*x), ...
'potential');
sysViewer({'\phi' [-pi pi]}, ...
{'b/a' [0 1]; '\Delta\omega' [-2 2]; 'c' [0 .5]; 'd' [0 .5]}, ...
@(x,c) c(2)-sin(x)-2*c(1)*sin(2*x)+c(3)*cos(x)+2*c(4)*cos(2*x), ...
'flow');
------
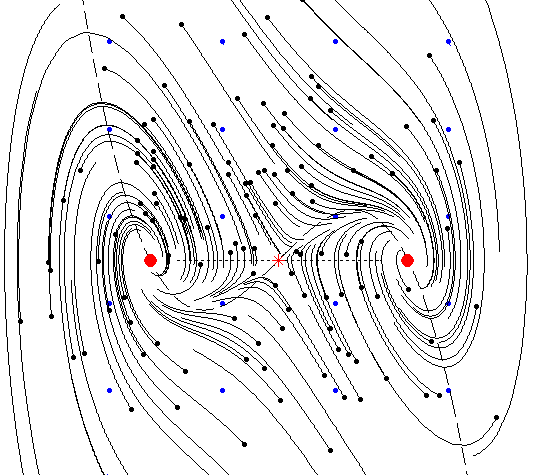
Two-dimensional
---
sysViewer('x' [-5 5]; '\dot{x}' [-5 5]}, ...
[{'\alpha'; '\beta'; '\delta'} repmat({[-5 5]}, 3, 1)], ...
{@(x,dx,r) dx, @(x,dx,r) -r(1).*x.^3 - r(2).*x - r(3).*dx}, ...
'flow')
--------
Dependencies (if missing, user will be prompted to download and install):
GUI Layout Toolbox
sliderPanel
uibutton
Chebfun:
- Stable version (one-dimensional systems only)
- Alpha release (required for viewing two-dimensional systems)
(as of March 14 2013)
Cite As
Henry Harrison (2023). Dynamical System Viewer (/matlabcentral/fileexchange/40812-dynamical-system-viewer), MATLAB Central File Exchange. Retrieved .
MATLAB Release Compatibility
Platform Compatibility
Windows macOS LinuxCategories
Tags
Acknowledgements
Inspired by: uibutton: GUI pushbuttons with better labels, sliderPanel, Chebfun V4 - old version; please download current version instead, GUI Layout Toolbox, Require FEX package
Community Treasure Hunt
Find the treasures in MATLAB Central and discover how the community can help you!
Start Hunting!Discover Live Editor
Create scripts with code, output, and formatted text in a single executable document.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)