Virtual Vehicle Composer
Description
The Virtual Vehicle Composer app enables you to quickly configure and build a virtual vehicle that you can use for system-level performance testing and analysis, including component sizing, fuel economy, drive cycle tracking, vehicle handling maneuvers, software integration testing, and hardware-in-the-loop (HIL) testing. Use the app to enter your vehicle parameter data, build a virtual vehicle model, run test scenarios, and analyze the results.
The virtual vehicle model utilizes sets of blocks and reference application subsystems available with Powertrain Blockset™, Vehicle Dynamics Blockset™, and Simscape™ add-ons. Virtual Vehicle Composer simplifies the task of configuring the architecture and entering parameter data.
If you have Powertrain Blockset, use the app to:
Configure conventional vehicle, electric vehicle (EV), and hybrid-electric vehicle (HEV) architectures.
Operate the vehicle in test conditions such as FTP cycles.
Analyze design tradeoffs and size components.
If you have Vehicle Dynamics Blockset, use the app to:
Configure passenger cars and analyze their ride-and-handling characteristics by running standard test maneuvers.
Configure and test a motorcycle. Requires a Simscape license.
Visualize your virtual vehicle in the Unreal Engine® simulation environment.
If you have Simscape and these Simscape add-ons, you can use the app to configure vehicles with Simscape subsystems:
Simscape Driveline™
Simscape Electrical™
Simscape Fluids™
Simscape Multibody™ — Required for motorcycles
To build, operate, and analyze your virtual vehicle, use the Composer tab. The options and settings depend on the available products.
| Step | Section | Button | Description | |
|---|---|---|---|---|
1 | Configure |
| Setup | Specify:
Click Configure. |
2 |
| Data and Calibration | Specify the chassis, tire, brake type, powertrain, driver, and environment. For each selection, enter the parameter data. | |
3 |
| Scenario and Test | Construct a test plan including one or more virtual vehicle test scenarios. Options include drive cycles for fuel economy and energy management analysis and vehicle handling maneuvers. | |
4 |
| Logging | Select the model signal data to log while testing your virtual vehicle. Options include energy-related quantities and vehicle position, velocity, and acceleration. You can also set the default signals for further tests. | |
5 | Build |
| Virtual Vehicle | Build your virtual vehicle. When you build, the Virtual Vehicle Composer creates a Simulink® model that contains the vehicle and powertrain architectures and parameters you specify and associates it with the test plan. |
6 | Operate |
| Run Test Plan | Simulate your model according to your test plan and log the resulting output data.
Note To operate the model, on the Composer tab, in the Operate section, click Run Test Plan.
|
7 | Analyze |
| Simulation Data Inspector | Use the Simulation Data Inspector to view and inspect the data signals that you log. You can store your data for further processing. |
Open the Virtual Vehicle Composer App
MATLAB® Toolstrip: On the Apps tab, under Automotive, click the Virtual Vehicle Composer icon.
MATLAB Command Window: Enter
virtualVehicleComposer.
Parameters
Setup
Start here to quickly enter your virtual vehicle class, powertrain architecture, model template, and vehicle dynamics.
Project path — Project location
C:\Users\username\MATLAB\Projects\examples (default)
username\MATLAB\Projects\examplesProject location, specified as a character vector.
Note
The combined Project path and Configuration name must be less than 80 characters.
Data Types: char
Configuration name — Name of vehicle and test configuration
ConfiguredVirtualVehicle (default)
Name of the vehicle and test configuration.
Note
The combined Project path and Configuration name must be less than 80 characters.
Data Types: char
Vehicle class — Type of vehicle
Passenger car (default) | Motorcycle
Use this parameter to specify the vehicle type.
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Four-wheeled passenger car. |
| ✔ | Two-wheeled motorcycle. |


Dependencies
If you set Vehicle class to
Motorcycle, the app sets the parameter Model
template to Simscape.
If you have Simscape and these Simscape add-ons, you can use the app to configure vehicles with Simscape subsystems:
Simscape Driveline
Simscape Electrical
Simscape Fluids
Simscape Multibody — Required for motorcycles
Powertrain architecture — Conventional, electric (EV), or hybrid electric (HEV) passenger vehicle. Conventional or electric motorcycle
Conventional Vehicle | Electric Vehicle 1EM | Electric Vehicle 2EM | Electric Vehicle 3EM Dual Front | Electric Vehicle 3EM Dual Rear | Electric Vehicle 4EM | Hybrid Electric P0 | Hybrid Electric P1 | Hybrid Electric P2 | Hybrid Electric P3 | Hybrid Electric P4 | Hybrid Electric MM | Hybrid Electric IPS | Conventional Motorcycle with Chain Drive | Electric Motorcycle with Chain Drive
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Note
To refer back to your Powertrain architecture diagram, click the Setup tab. You will see the configuration of the system, including motor placement.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Vehicle with an SI or CI internal combustion engine, transmission, and corresponding control units. May be FWD, RWD, or AWD. |
| ✔ | ✔ | Vehicle with one electric motor, and battery, driveline, and corresponding control units. May be FWD, RWD, or AWD. |
| ✔ | Vehicle with one motor driving the front axle and one motor driving the rear axle; battery, driveline, and corresponding control units. | |
| ✔ | Vehicle with two independent motors driving the front axle and one motor driving the rear axle; battery, driveline, and corresponding control units. | |
| ✔ | Vehicle with one motor driving the front axle and two independent motors driving the rear axle; battery, driveline, and corresponding control units. | |
| ✔ | Vehicle with one independent motor driving each wheel; battery, and corresponding control units. | |
Hybrid Electric P0 | ✔ | Vehicle with P0 hybrid-electric propulsion, including an SI engine, transmission, motor, battery, and corresponding control units. | |
Hybrid Electric P1 | ✔ | Vehicle with P1 hybrid-electric propulsion, including an SI engine, transmission, motor, battery, and corresponding control units. | |
Hybrid Electric P2 | ✔ | Vehicle with P2 hybrid-electric propulsion, including an SI engine, transmission, motor, battery, and corresponding control units. | |
Hybrid Electric P3 | ✔ | Vehicle with P3 hybrid-electric propulsion, including an SI engine, transmission, motor, battery, and corresponding control units. | |
Hybrid Electric P4 | ✔ | Vehicle with P4 hybrid-electric propulsion, including an SI engine, transmission, motor, battery, and corresponding control units. | |
Hybrid Electric MM | ✔ | Vehicle with multi-mode hybrid-electric propulsion, including an SI engine, transmission, motor, generator, battery, and corresponding control units. | |
Hybrid Electric IPS | ✔ | Vehicle with input power split hybrid-electric propulsion, including an SI engine, transmission, motor, generator, battery, and corresponding control units. | |
| ✔ | Motorcycle with an SI engine, transmission and chain reduction, and corresponding control units. Requires Simscape. | |
| ✔ | Motorcycle with an electric motor, gear and chain reductions, battery, and corresponding control units. Requires Simscape. |
If you have Simscape and Simscape add-ons, you can use the app to configure vehicles that incorporate Simscape subsystems, including motorcycles.
Model template — Vehicle plant model and powertrain architecture template
Simulink (default) | Simscape
Use this parameter to specify a Simulink or
Simscape vehicle plant model and powertrain architecture.
By default, the virtual vehicle uses a Simulink model
template.
If you have Simscape and these Simscape add-ons, you can use the app to configure vehicles with Simscape subsystems:
Simscape Driveline
Simscape Electrical
Simscape Fluids
Simscape Multibody — Required for motorcycles
Dependencies
If you set Vehicle class to
Motorcycle, the app sets Model
template to Simscape. You cannot configure a
motorcycle and select Simulink as model template.
Vehicle dynamics — Virtual vehicle longitudinal (3 DOF) or combined (6 DOF) dynamics
Longitudinal vehicle dynamics (default) | Combined longitudinal and lateral vehicle
dynamics
| Vehicle Class Setting | Vehicle Dynamics Setting | Goal |
|---|---|---|
Passenger car |
| Fuel economy and energy management analysis. |
| Vehicle handling, stability, and ride comfort analysis. | |
Motorcycle |
| Fuel economy and energy management analysis. |
| Motorcycle handling, stability, and ride comfort analysis. |




The virtual vehicle uses the Z-up coordinate system as defined in SAE J670 and ISO 8855. For more information, see Coordinate Systems in Vehicle Dynamics Blockset.
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Three degree-of-freedom (DOF) conventional vehicle model suitable for fuel economy and energy management analysis. |
| ✔ | Six DOF conventional vehicle suitable for vehicle handling, stability, and ride comfort analysis. Not available with
| |
| ✔ | Three DOF motorcycle model suitable for fuel economy and energy management analysis. The model implements a longitudinal in-plane motorcycle body model to calculate longitudinal, vertical, and pitch motion. Available if you have Simscape and Simscape add-ons. | |
Out-of-plane motorcycle dynamics | ✔ | Six DOF motorcycle suitable for vehicle handling, stability, and ride comfort analysis. Available if you have Simscape and Simscape add-ons. |
Dependencies
If you set Vehicle class to Passenger
car and then set Model template to
Simscape, the app sets Vehicle
dynamics to Combined longitudinal and lateral vehicle
dynamics.
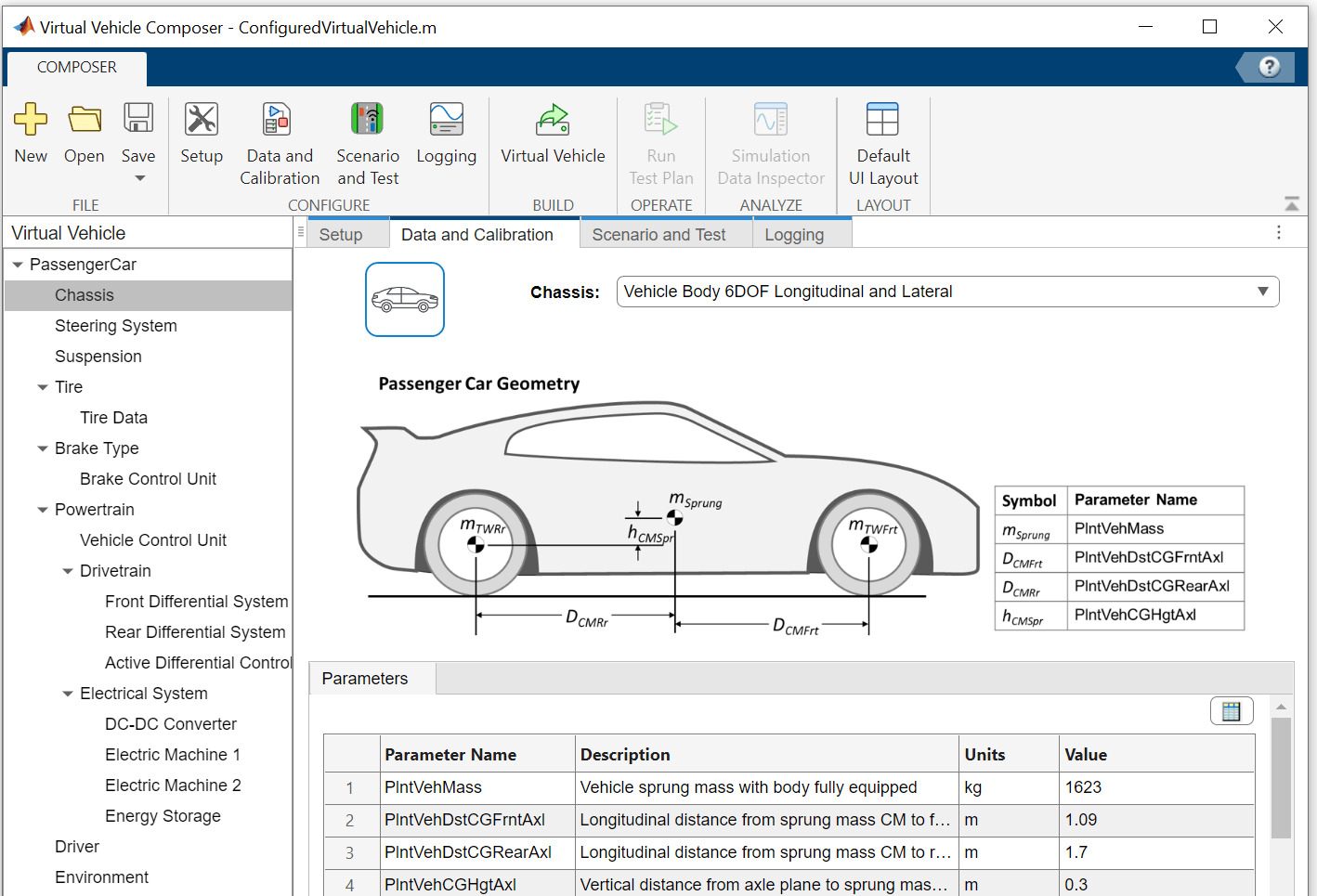
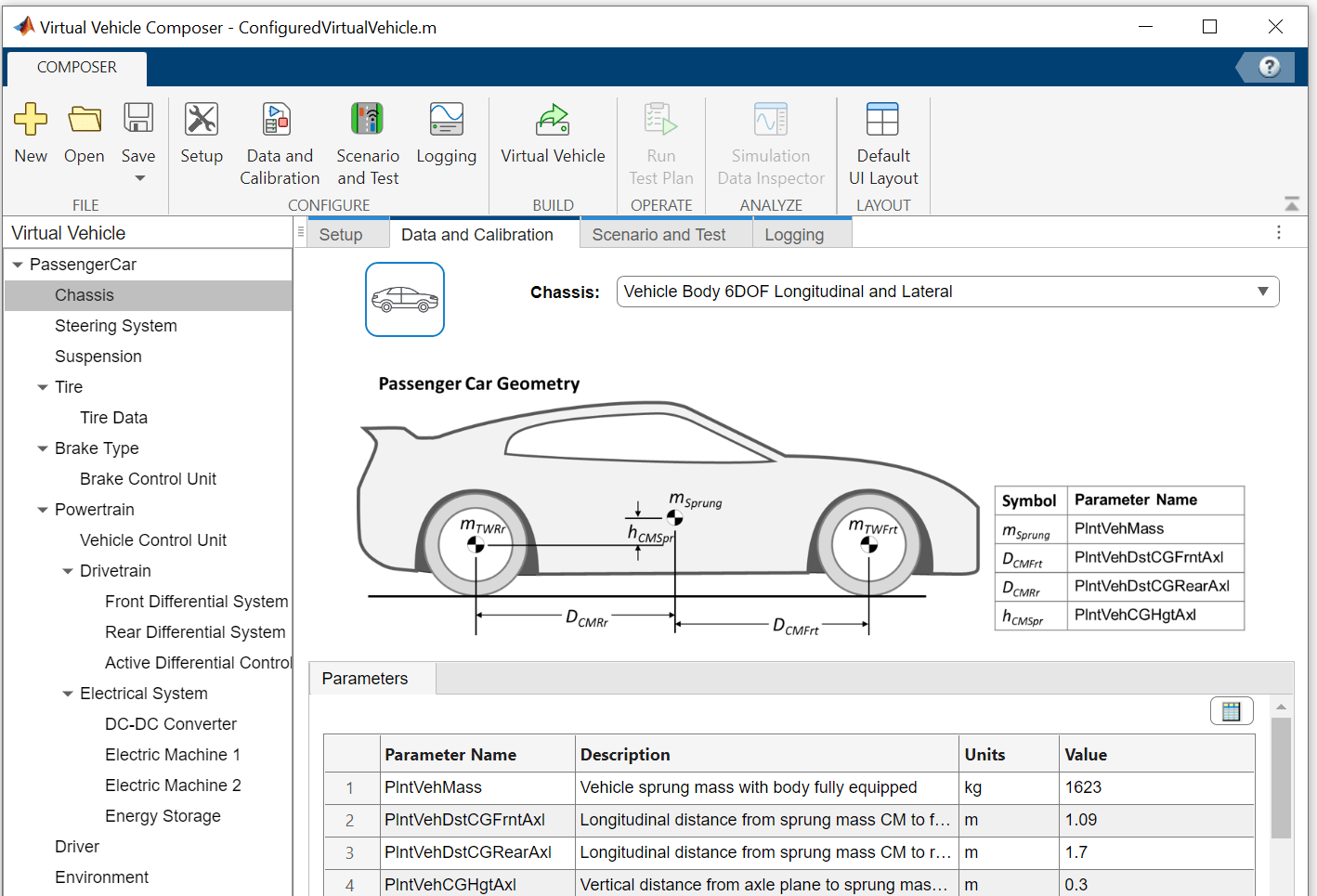
Data and Calibration
Use the app to quickly set your virtual vehicle parameters, such as chassis and suspension, tires, powertrain, and driver. Select one of the options for each parameter. The available options depend on your Setup selections.
| Parameter | Description |
|---|---|
| Chassis | Select the chassis type. The available options depend on the Vehicle class and Vehicle dynamics settings. |
| Tire | Select the tire model and tire data. The available options depend on the Vehicle class and Vehicle dynamics settings. |
| Brake Type | Select the brake type. Use the Brake Control Unit parameter to specify the brake control. |
| Powertrain | Select the engine, electric motors, transmission, drivetrain, differential system, and electrical system parameters. The available options depend on the Powertrain architecture selected. |
| Driver/Rider | If you set Vehicle class to If you set Vehicle class to
|
| Environment | Use the parameter setting |
| Steering System | If you set Vehicle class to If you set Vehicle
class to |
| Suspension | If you set Vehicle class to If you set Vehicle
class to |
Chassis — Chassis type
Vehicle Body 1DOF Longitudinal | Vehicle Body 3DOF Longitudinal | Vehicle Body 6DOF Longitudinal and Lateral
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Chassis model for 1DOF longitudinal vehicle dynamics. Available
when you set Vehicle dynamics to
|
| ✔ | ✔ | Chassis model for 3DOF longitudinal vehicle dynamics. Available
when you set Vehicle dynamics to
|
Vehicle Body 6DOF Longitudinal and
Lateral | ✔ | Chassis model for 6DOF longitudinal and lateral vehicle dynamics.
Available when you set Vehicle dynamics to
|
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Passenger
car.
Tire — Model and specifications of tires
MF Tires Longitudinal | Fiala Tires Longitudinal and Lateral | MF Tires Longitudinal and Lateral | Longitudinal Combined Slip Tire
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Tire model suitable for longitudinal vehicle dynamics studies, including fuel economy and energy management analysis. |
Fiala Tires Longitudinal and Lateral
| ✔ | Tire model suitable for lateral vehicle dynamics studies, including vehicle handling, stability, and ride comfort analysis. Implements a simplified tire with lateral and longitudinal slip capability. Uses a translational friction model to calculate the forces and moments during combined longitudinal and lateral slip. Consider this setting if you do not have the tire coefficients needed by the Magic Formula and are conducting studies that do not involve extensive nonlinear combined lateral slip or lateral dynamics. | |
MF Tires Longitudinal and Lateral | ✔ | Tire models suitable for lateral vehicle dynamics studies, including vehicle handling, stability, and ride comfort analysis. Tire model implements the longitudinal and lateral behavior of a wheel characterized by the Magic Formula. You can use Tire Data parameter to specify fitted tire data sets provided by the Global Center for Automotive Performance Simulation (GCAPS) for tires, including:
| |
| ✔ |
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Passenger
car.
Brake Type — Virtual vehicle brakes
Disc | Drum | Mapped
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Brake model converts the brake fluid pressure into a braking torque. |
| ✔ | ✔ | Brake model converts the brake fluid pressure and brake geometry into a braking torque. |
Mapped | ✔ | ✔ | Brake torque is a mapped function of the wheel speed and the brake fluid pressure. |
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Passenger
car.
Brake Control Unit — Brake control
Open Loop (default) | Bang Bang ABS | Five-State ABS and TCS
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Open loop brake control. The controller commands brake pressure as a sole function of the brake command. |
| ✔ | ✔ | Anti-lock braking system (ABS) feedback controller that switches between two states to regulate wheel slip, to minimize the error between the actual slip and the desired slip. Here, the desired slip is the value where the friction coefficient of the tires reaches its maximum. |
Five-State ABS and TCS | ✔ | ✔ | Five-state ABS and traction control system (TCS) that uses logic-switching based on wheel deceleration and vehicle acceleration to control the braking pressure at each wheel. Consider using five-state ABS and TCS control to prevent wheel lock-up, decrease braking distance, or maintain yaw stability during maneuvers. The default ABS parameters are set to work on roads that have a constant friction coefficient scaling factor of 0.6. |
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Passenger
car.
Engine — Internal combustion engine
Simple Engine (SI) (default) | Simple Engine (CI) | CI Engine | CI Mapped Engine | SI Engine | SI Mapped Engine | SI Deep Learning Engine | FMU Engine
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description | ||||
|---|---|---|---|---|---|---|---|
Simple Engine (SI) | ✔ | ✔ | Simplified SI engine model using a maximum torque versus engine speed table, two scalar fuel mass properties, and one scalar engine efficiency parameter to estimate engine torque and fuel flow. Selecting | ||||
| ✔ | ✔ | Simplified CI engine model using a maximum torque versus engine speed table, two scalar fuel mass properties, and one scalar engine efficiency parameter to estimate engine torque and fuel flow. Selecting | ||||
| ✔ | Compression-ignition (CI) engine modeled from intake to the exhaust port. Selecting | |||||
| ✔ | Mapped CI engine model using power, air mass flow, fuel flow, exhaust temperature, efficiency, and emission performance lookup tables. Selecting If you have the Model-Based Calibration Toolbox™, you can generate a static calibration. Select from options on Calibrate from Data. For more information, see Calibrate Mapped CI Engine Using Data (Powertrain Blockset). | |||||
| ✔ | Spark-ignition (SI) engine modeled from intake to exhaust port. Selecting | |||||
| ✔ | ✔ | Mapped SI engine model using power, air mass flow, fuel flow, exhaust temperature, efficiency, and emission performance lookup tables. Selecting If you have the Model-Based Calibration Toolbox, you can generate a static calibration. Select from options on Calibrate from Data. For more information, see Calibrate Mapped SI Engine Using Data (Powertrain Blockset). | ||||
| ✔ | Deep learning SI engine. Available if you have the Deep Learning Toolbox™ and Statistics and Machine Learning Toolbox™ licenses. Use this setting to generate a dynamic deep learning SI engine model to use for powertrain control, diagnostic, and estimator algorithm design. Selecting | |||||
| ✔ | ✔ | The functional mockup unit (FMU) engine implements an FMU block with these engine inputs and outputs.
To implement the FMU engine model:
|
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Passenger
car.
Transmission — Virtual vehicle transmission
Ideal Fixed Gear Transmission | Automatic Transmission with Torque Converter | Automated Manual Transmission
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Idealized fixed-gear transmission without a clutch or synchronization. Use this setting to model the gear ratios and power loss when you do not need a detailed transmission model. |
| ✔ | Automatic transmission with planetary gears and a torque converter. | |
| ✔ | A manual transmission with additional actuators and an electronic control unit (ECU) to regulate clutch and gear selection based on commands from a controller. Clutch and synchronizer engagement rates are linear and adjustable. |
Dependencies
To enable this parameter, on the Setup pane:
Set Vehicle class to
Passenger car.Set Powertrain architecture to any of these options:
Conventional VehicleHybrid Electric Vehicle P0Hybrid Electric Vehicle P1Hybrid Electric Vehicle P2Hybrid Electric Vehicle P3Hybrid Electric Vehicle P4
Transmission Control Unit — Virtual vehicle transmission control
PRNDL Controller
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Controller that executes forward, reverse, neutral, park, and N-speed gear shifts according to the selected shift schedule. You can supply multiple schedules and select them using a block input. |
Dependencies
To enable this parameter, on the Setup pane:
Set Vehicle class to
Passenger car.Set Powertrain architecture to any of these options:
Conventional VehicleHybrid Electric Vehicle P0Hybrid Electric Vehicle P1Hybrid Electric Vehicle P2Hybrid Electric Vehicle P3Hybrid Electric Vehicle P4
Drivetrain — Virtual vehicle drivetrain
Front Wheel Drive (default) | Rear Wheel Drive | All Wheel Drive
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Drives both wheels on the front axle. |
Rear Wheel Drive | ✔ | ✔ | Drives both wheels on the rear axle. |
All Wheel Drive | ✔ | ✔ | Drives all four wheels. |
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Passenger
car.
Front Differential System — Final drive ratio and differential action
Open Differential (default) | Active Differential | Limited Slip Differential
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Implements differential action with equal torque to both wheels. |
| ✔ | ✔ | Couples active elements to an open differential to achieve the desired axle torque bias. Not available if you set
Model template to
|
| ✔ | ✔ | Couples passive friction elements to an open differential to achieve the desired axle torque bias. |
Dependencies
To enable this parameter, set Vehicle class to
Passenger car and Drivetrain to
Front Wheel Drive or All Wheel
Drive.
Rear Differential System — Final drive ratio and differential action
Open Differential (default) | Active Differential | Limited Slip Differential
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Implements differential action with equal torque to both wheels. |
| ✔ | ✔ | Couples active elements to an open differential to achieve the desired axle torque bias. Not available if you set
Model template to
|
| ✔ | ✔ | Couples passive friction elements to an open differential to achieve the desired axle torque bias. |
Dependencies
To enable this parameter, set Vehicle class to
Passenger car and Drivetrain to
Rear Wheel Drive or All Wheel
Drive.
Axle Interconnect — Coupling between front and rear axles
Transfer Case (default)
Coupling between front and rear axles, specified as a transfer case.
Dependencies
To enable this parameter, set Vehicle class to
Passenger car and Drivetrain to
All Wheel Drive.
DC-DC Converter — Power electronics device to change voltage of supplied current
DC-DC Converter (default) | No DC-DC Converter
DC-to-DC converter that supports bidirectional boost and buck (lower) operations.
Dependencies
To enable this parameter, set Vehicle class to
Passenger car and Powertrain
architecture to one of these options:
Electric Vehicle, wherexEMxis 1, 2, or 4Electric Vehicle 3EM Dual FrontElectric Vehicle 3EM Dual RearHybrid Electric Vehicle P, wherexxis 0, 1, 2, 3 or 4Hybrid Electric Vehicle MMHybrid Electric Vehicle IPS
Electric Machine x — Virtual vehicle electric motor
Electric Vehicle 1EM | Electric Vehicle 2EM | Electric Vehicle 3EM Dual Front | Electric Vehicle 3EM Dual Rear | Electric Vehicle 4EM | Hybrid Electric Vehicle P0 | Hybrid Electric Vehicle P1 | Hybrid Electric Vehicle P2 | Hybrid Electric Vehicle P3 | Hybrid Electric Vehicle P4 | Hybrid Electric Vehicle MM | Hybrid Electric Vehicle IPS
xVirtual vehicle electric machine settings for motor in location
x as seen on the Powertrain
architecture diagram on the Setup pane.
Dependencies
To enable this parameter, set Vehicle class to
Passenger car and Powertrain
architecture to one of these options:
Electric Vehicle, wherexEMxis 1, 2, or 4Electric Vehicle 3EM Dual FrontElectric Vehicle 3EM Dual RearHybrid Electric Vehicle P, wherexxis 0, 1, 2, 3 or 4Hybrid Electric Vehicle MMHybrid Electric Vehicle IPS
Energy Storage — Virtual vehicle energy storage type
Mapped Battery | Ideal Voltage Source
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | ✔ | Open-circuit voltage and internal resistance are mapped functions of the state-of charge (SOC) and battery temperature |
| ✔ | ✔ | Constant-voltage source with infinite storage capacity |
Dependencies
To enable this parameter, set Vehicle class to
Passenger car and Powertrain
architecture to one of these options:
Electric Vehicle, wherexEMxis 1, 2, or 4Electric Vehicle 3EM Dual FrontElectric Vehicle 3EM Dual RearHybrid Electric Vehicle P, wherexxis 0, 1, 2, 3 or 4Hybrid Electric Vehicle MMHybrid Electric Vehicle IPS
Vehicle Control Unit — Vehicle system to direct the energy flows in electric and hybrid-electric vehicles
EV 1EM with BMS | EV 2EM | EV 3EM Dual Front | EV 3EM Dual Rear | EV 4EM | HEVP0 Optimal | HEVP1 Optimal | HEVP2 Optimal | HEVP3 Optimal | HEVP4 Optimal | HEVMM RuleBased | HEVIPS RuleBased
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Powertrain Architecture | Description |
|---|---|---|---|---|
EV 1EM with BMS | ✔ | ✔ | Electric Vehicle 1EM | Controls the motor with torque arbitration and power management. Implements regenerative braking. |
EV 2EM | ✔ | Electric Vehicle 2EM | ||
EV 3EM Dual Front | ✔ | Electric Vehicle 3EM Dual Front | ||
EV 3EM Dual Rear | ✔ | Electric Vehicle 3EM Dual Rear | ||
EV 4EM | ✔ | Electric Vehicle 4EM | ||
| ✔ | Hybrid Electric Vehicle P0 | Implements an equivalent consumption minimization strategy (ECMS) to control the energy management of hybrid electric vehicles (HEVs). The strategy optimizes the torque split between the engine and motor to minimize energy consumption while maintaining the battery state of charge (SOC). Implements regenerative braking. | |
| ✔ | Hybrid Electric Vehicle P1 | ||
| ✔ |
| ||
| ✔ |
| ||
HEVP4 Optimal | ✔ |
| ||
HEVMM RuleBased | ✔ |
| Controls the motor, generator, and engine through a set of rules and decision logic implemented in Stateflow®. Implements regenerative braking. | |
HEVIPS RuleBased | ✔ |
|
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Passenger
car.
Driver — Virtual vehicle driver
Longitudinal Driver | Predictive Driver | Predictive Stanley Driver
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
Longitudinal Driver | ✔ | ✔ | Implements a longitudinal speed-tracking controller. |
| ✔ | Tracks longitudinal velocity and a lateral displacement relative to a reference pose. Available when you set Vehicle
dynamics to | |
| ✔ | Adjusts the steering angle command to match the current pose of a vehicle to a reference pose, given the vehicle's current velocity and direction. Available when you set Vehicle dynamics to
|
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Passenger
car.
Steering System — Virtual vehicle steering
Kinematic Steering | Mapped Steering | Dynamic Steering | Steering System | No Steering
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Kinematic model for ideal rack-and-pinion steering. Gears convert the steering wheel rotation into linear rack motion. | |
| ✔ | Mapped rack-and-pinion steering model. | |
| ✔ | Dynamic model for ideal rack-and-pinion steering. Gears convert the steering wheel rotation into linear rack motion. | |
| ✔ | Steering system for Ackerman and rack-and-pinion steering mechanisms. | |
| ✔ | No steering. |
Dependencies
To enable this parameter, on the Setup pane:
Set Vehicle class to
Passenger car.Set Vehicle dynamics to
Combined longitudinal and lateral vehicle dynamics.
Suspension — Virtual vehicle suspension system
Kinematics and Compliance Independent
Suspension | MacPherson Front Suspension Solid Axle Rear
Suspension | Kinematics and Compliance Twist Beam
Suspension | No Suspension
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Kinematics and compliance (K & C) test suspension characteristics measured from simulated or actual laboratory suspension tests. | |
| ✔ | Independent MacPherson front suspension and solid rear axle. | |
| ✔ | Kinematics and compliance characteristics of:
| |
| ✔ | No suspension. |
Dependencies
To enable this parameter, on the Setup pane:
Set Vehicle class to
Passenger car.Set Vehicle dynamics to
Combined longitudinal and lateral vehicle dynamics.
Front Tire — Linear front tire
Linear Front SSC Tire (default)
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Tire with linear force and moment model, using Simscape modeling. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Rear Tire — Linear rear tire
Linear Rear SSC Tire (default)
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Tire with linear force and moment model, using Simscape modeling. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Front Brake Type — Brake type
Disc (default) | Drum | Mapped
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Brake model converts the brake fluid pressure into a braking torque. | |
| ✔ | Brake model converts the brake fluid pressure and brake geometry into a braking torque. | |
Mapped | ✔ | Brake torque is a mapped function of the wheel speed and the brake fluid pressure. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Rear Brake Type — Brake type
Disc (default) | Drum | Mapped
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Brake model converts the brake fluid pressure into a braking torque. | |
| ✔ | Brake model converts the brake fluid pressure and brake geometry into a braking torque. | |
Mapped | ✔ | Brake torque is a mapped function of the wheel speed and the brake fluid pressure. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Brake Control Unit — Brake control
Open Loop (default) | Bang Bang ABS | Five-State ABS and TCS
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Open loop brake control. The controller commands brake pressure as a sole function of the brake command. | |
| ✔ | Anti-lock braking system (ABS) feedback controller that switches between two states to regulate wheel slip, with the aim of minimizing the error between the actual slip and the desired slip. Here, the desired slip is the value where the tires' friction coefficient reaches its maximum. | |
Five-State ABS and TCS | ✔ | Five-state ABS and traction control system (TCS) that uses logic-switching based on wheel deceleration and vehicle acceleration to control the braking pressure at each wheel. Consider using five-state ABS and TCS control to prevent wheel lock-up, decrease braking distance, or maintain yaw stability during maneuvers. The default ABS parameters are set to work on roads that have a constant friction coefficient scaling factor of 0.60. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Steering System — Steering
Steering (default) | No Steering
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Handlebar-steered front fork on a frame-mounted revolute joint. | |
| ✔ | Steering angle fixed at zero. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane:
Set Vehicle class to
Motorcycle.Set Vehicle dynamics to
Out-of-plane motorcycle dynamics.
Steering Damper — Damper
Simple Damper (default) | No Damper
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | No damping. | |
| ✔ | Torsional damper about steering axis, with linear viscous damping. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane:
Set Vehicle class to
Motorcycle.Set Vehicle dynamics to
Out-of-plane motorcycle dynamics.
Front Suspension — Motorcycle suspension
Simple Spring and Damper
Suspension (default)
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Telescoping fork with linear spring and damper. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane:
Set Vehicle class to
Motorcycle.Set Vehicle dynamics to
Out-of-plane motorcycle dynamics.
Rear Suspension — Motorcycle suspension
Simple Spring and Damper
Suspension (default)
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Swing arm with linear spring and damper. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane:
Set Vehicle class to
Motorcycle.Set Vehicle dynamics to
Out-of-plane motorcycle dynamics.
Propulsion System — Motorcycle propulsion system
Simple Engine | Mapped Engine | Moto Electrical System
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Simplified SI engine model using a maximum torque versus engine speed table, two scalar fuel mass properties, and one scalar engine efficiency parameter to estimate engine torque and fuel flow. Available when you set Powertrain
architecture to | |
| ✔ | Mapped SI engine model using power, air mass flow, fuel flow, exhaust temperature, efficiency, and emission performance lookup tables. Available when you set Powertrain
architecture to | |
Moto Electrical System | ✔ | Electric propulsion system. Available when you set
Powertrain architecture to | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Chain — Motorcycle chain and sprocket drive system
Chain Drive (default)
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Inextensible chain which meshes with front and rear sprockets. Rear sprocket is mounted to wheel with a torsional damper. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Rider — Rider type
Rigid (default) | 6DOF and External Forces and Moments
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Rider implemented as a rigid body so that their relative motion to the motorcycle frame is zero. No crouching, and their lean angle is the same as the motorcycle frame. | |
| ✔ | Rider body implemented with six degrees-of-freedom (DOF) relative to the motorcycle frame. Able to lean and crouch independently of frame. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Rider Control — Motorcycle control type
Open Loop (default)
The parameter options depend on the available products. This table summarizes the options available with Powertrain Blockset and Vehicle Dynamics Blockset.
Setting | Powertrain Blockset | Vehicle Dynamics Blockset | Description |
|---|---|---|---|
| ✔ | Steering of front fork as prescribed by test scenario. | |
*Motorcycle configuration options require Simscape and Simscape add-ons. | |||
Dependencies
To enable this parameter, on the Setup pane, set Vehicle
class to Motorcycle.
Environment — Virtual vehicle environment
Standard Ambient
The parameter setting Standard Ambient implements an
ambient environment model.
Scenario and Test
Assemble a test plan for your virtual vehicle.
If you set Scenario to Drive
Cycle, you can use:
Drive cycles from predefined sources. By default, the block includes the
FTP–75drive cycle. To install additional drive cycles from the support package, see Support Package for Maneuver and Drive Cycle Data. The support package has drive cycles that include the gear shift schedules, for example,JC08andCUEDC.Workspace variables that define your own drive cycles.
.
mat, .xls, .xlsx, or .txtfiles.Wide open throttle (WOT) parameters, including initial and nominal reference speeds, deceleration start time, and final reference speed.
For a Passenger car, if you have Vehicle Dynamics Blockset and set Vehicle dynamics to Combined
longitudinal and lateral vehicle dynamics, you can select maneuvers for
vehicle handling, stability, and ride analysis. Maneuvers include:
Increasing SteerSwept SineSine with DwellFishhook
For a Motorcycle, if you set Vehicle
dynamics to Out-of-plane motorcycle dynamics, you
can select maneuvers for vehicle handling, stability, and ride analysis. Maneuvers include:
Steady TurningHandle Hit
If you want to run your virtual vehicle in the Unreal Engine 3D simulation environment, set 3D Scene Selection to
3D Scene. For hardware requirements, see Unreal Engine Simulation Environment Requirements and Limitations.
Logging
On the Logging tab, select the signals to log. The app has a default set of signals in the Selected Signals list. The default list depends on the vehicle configuration. You can add or remove signals. Options include energy-related quantities, and vehicle position, velocity, and acceleration.
Build
Click Virtual Vehicle to build your vehicle. When you build, the Virtual Vehicle Composer app creates a Simulink model that incorporates the vehicle architecture and parameters that you have specified and associates it with the test plan you configured.
The build takes time to complete. View progress in the MATLAB Command Window.
Operate
To operate the model, on the Composer tab in the
Operate section, click Run Test Plan![]() .
.
The simulations take time to complete. View progress in the MATLAB Command Window.
Analyze
Click Simulation Data Inspector to view and analyze simulation signals you chose to log during operation.
If your test plan includes more than one test scenario, the Simulation Data Inspector displays the results from the last scenario. To see results from earlier scenarios, load the archived results.
Programmatic Use
Version History
Introduced in R2022aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)