Train DDPG Agent for Path-Following Control
This example shows how to train a deep deterministic policy gradient (DDPG) agent for path-following control (PFC) in Simulink®. For more information on DDPG agents, see Deep Deterministic Policy Gradient (DDPG) Agents.
Simulink Model
The reinforcement learning environment for this example consists in a simple bicycle model for the ego car together with a simple longitudinal model for the lead car. The training goal is to make the ego car travel at a set velocity while maintaining a safe distance from lead car by controlling longitudinal acceleration and braking, and also while keeping the ego car travelling along the centerline of its lane by controlling the front steering angle. For more information on PFC, see Path Following Control System (Model Predictive Control Toolbox). The ego car dynamics are specified by the following parameters.
m = 1600; % total vehicle mass (kg) Iz = 2875; % yaw moment of inertia (mNs^2) lf = 1.4; % long. distance from center of gravity to front tires (m) lr = 1.6; % long. distance from center of gravity to rear tires (m) Cf = 19000; % cornering stiffness of front tires (N/rad) Cr = 33000; % cornering stiffness of rear tires (N/rad) tau = 0.5; % longitudinal time constant
Specify the initial position and velocity for the two vehicles.
x0_lead = 50; % initial position for lead car (m) v0_lead = 24; % initial velocity for lead car (m/s) x0_ego = 10; % initial position for ego car (m) v0_ego = 18; % initial velocity for ego car (m/s)
Specify the standstill default spacing (m), time gap (s), and driver-set velocity (m/s).
D_default = 10; t_gap = 1.4; v_set = 28;
To simulate the physical limitations of the vehicle dynamics, constrain the acceleration to the range [–3,2] (m/s^2), and the steering angle to the range [–0.2618,0.2618] (rad), that is -15 and 15 degrees.
amin_ego = -3; amax_ego = 2; umin_ego = -0.2618; % +15 deg umax_ego = 0.2618; % -15 deg
The curvature of the road is defined by a constant 0.001 (). The initial value for lateral deviation is 0.2 m and the initial value for the relative yaw angle is –0.1 rad.
rho = 0.001; e1_initial = 0.2; e2_initial = -0.1;
Define the sample time Ts and simulation duration Tf in seconds.
Ts = 0.1; Tf = 60;
Open the model.
mdl = "rlPFCMdl"; open_system(mdl) agentblk = mdl + "/RL Agent";
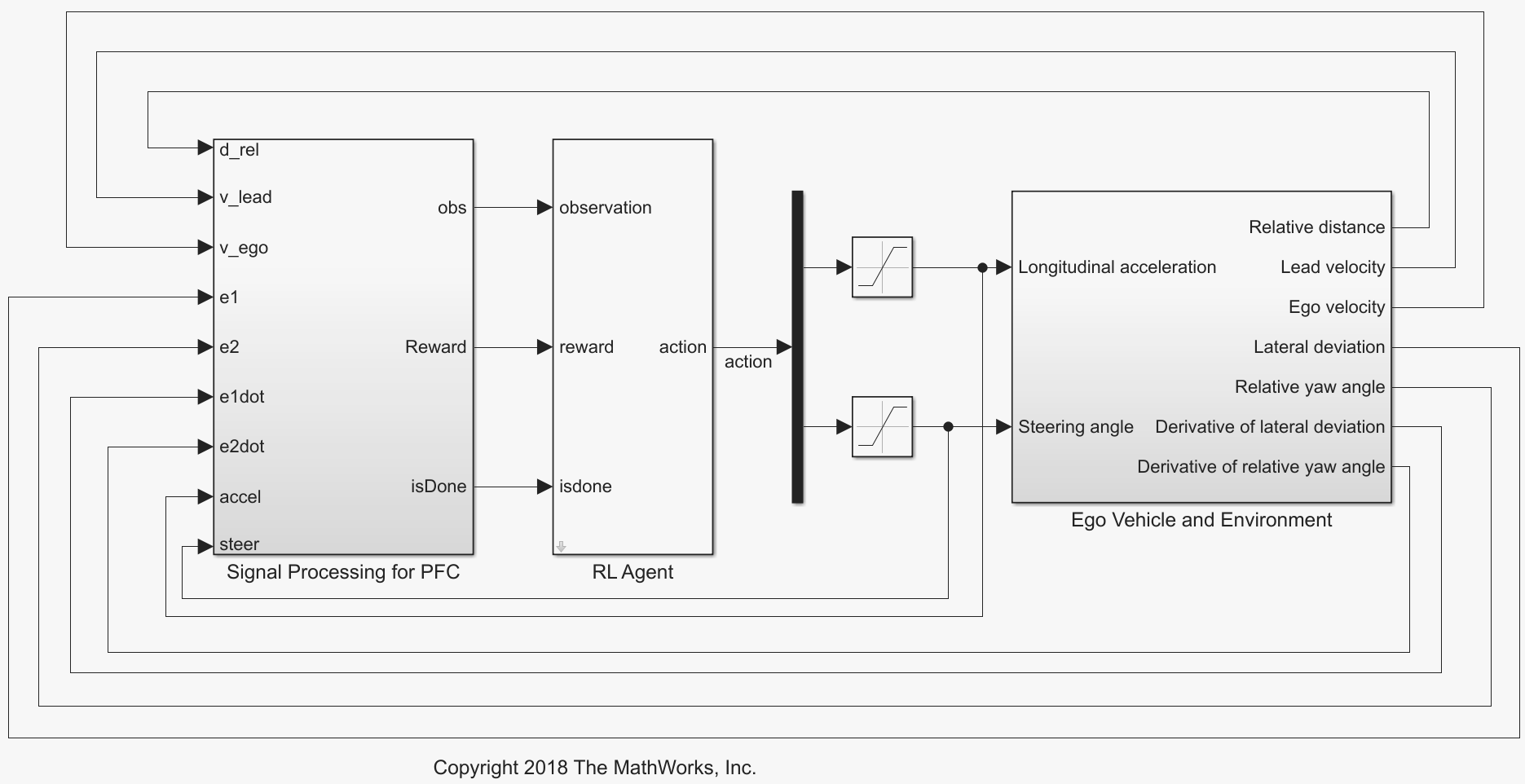
For this model:
The action signal consists of acceleration and steering angle actions. The acceleration action signal takes value between –3 and 2 (m/s^2). The steering action signal takes a value between –15 degrees (–0.2618 rad) and 15 degrees (0.2618 rad).
The reference velocity for the ego car is defined as follows. If the relative distance is less than the safe distance, the ego car tracks the minimum of the lead car velocity and driver-set velocity. In this manner, the ego car maintains some distance from the lead car. If the relative distance is greater than the safe distance, the ego car tracks the driver-set velocity. In this example, the safe distance is defined as a linear function of the ego car longitudinal velocity , that is, . The safe distance determines the tracking velocity for the ego car.
The observations from the environment contain the longitudinal measurements: the velocity error , its integral , and the ego car longitudinal velocity . In addition, the observations contain the lateral measurements: the lateral deviation , relative yaw angle , their derivatives and , and their integrals and .
The simulation terminates when the lateral deviation , when the longitudinal velocity , or when the relative distance between the lead car and ego car .
The reward , provided at every time step , is
where is the steering input from the previous time step , is the acceleration input from the previous time step. The three logical values are as follows.
if simulation is terminated, otherwise
if lateral error , otherwise
if velocity error , otherwise
The three logical terms in the reward encourage the agent to make both lateral error and velocity error small, and in the meantime, penalize the agent if the simulation is terminated early.
Create Environment Interface
Create an environment interface for the Simulink model.
Create the observation specification.
obsInfo = rlNumericSpec([9 1], ... LowerLimit=-inf*ones(9,1), ... UpperLimit=inf*ones(9,1)); obsInfo.Name = "observations";
Create the action specification.
actInfo = rlNumericSpec([2 1], ... LowerLimit=[-3;-0.2618], ... UpperLimit=[2;0.2618]); actInfo.Name = "accel;steer";
Create the environment interface.
env = rlSimulinkEnv(mdl,agentblk,obsInfo,actInfo);
To define the initial conditions, specify an environment reset function using an anonymous function handle. The reset function localResetFcn, which is defined at the end of the example, randomizes the initial position of the lead car, the lateral deviation, and the relative yaw angle.
env.ResetFcn = @(in)localResetFcn(in);
Fix the random generator seed for reproducibility.
rng(0)
Create DDPG Agent
DDPG agents use a parametrized Q-value function approximator to estimate the value of the policy. A Q-value function critic takes the current observation and an action as inputs and returns a single scalar as output (the estimated discounted cumulative long-term reward given the action from the state corresponding to the current observation, and following the policy thereafter).
To model the parametrized Q-value function within the critic, use a neural network with two input layers (one for the observation channel, as specified by obsInfo, and the other for the action channel, as specified by actInfo) and one output layer (which returns the scalar value). Note that prod(obsInfo.Dimension) and prod(actInfo.Dimension) return the number of dimensions of the observation and action spaces, respectively, regardless of whether they are arranged as row vectors, column vectors, or matrices.
Define each network path as an array of layer objects, and assign names to the input and output layers of each path. These names allow you to connect the paths and then later explicitly associate the network input and output layers with the appropriate environment channel.
% Number of neurons L = 100; % Main path mainPath = [ featureInputLayer(prod(obsInfo.Dimension),Name="obsInLyr") fullyConnectedLayer(L) reluLayer fullyConnectedLayer(L) additionLayer(2,Name="add") reluLayer fullyConnectedLayer(L) reluLayer fullyConnectedLayer(1,Name="QValLyr") ]; % Action path actionPath = [ featureInputLayer(prod(actInfo.Dimension),Name="actInLyr") fullyConnectedLayer(L,Name="actOutLyr") ]; % Assemble layergraph object criticNet = layerGraph(mainPath); criticNet = addLayers(criticNet,actionPath); criticNet = connectLayers(criticNet,"actOutLyr","add/in2");
Convert to dlnetwork object and display the number of weights.
criticNet = dlnetwork(criticNet); summary(criticNet)
Initialized: true
Number of learnables: 21.6k
Inputs:
1 'obsInLyr' 9 features
2 'actInLyr' 2 features
View the critic network configuration.
figure plot(criticNet)

Create the critic using the specified neural network and the environment action and observation specifications. Pass as additional arguments also the names of the network layers to be connected with the observation and action channels. For more information, see rlQValueFunction.
critic = rlQValueFunction(criticNet,obsInfo,actInfo,... ObservationInputNames="obsInLyr",ActionInputNames="actInLyr");
DDPG agents use a parametrized deterministic policy over continuous action spaces, which is learned by a continuous deterministic actor. This actor takes the current observation as input and returns as output an action that is a deterministic function of the observation.
To model the parametrized policy within the actor, use a neural network with one input layer (which receives the content of the environment observation channel, as specified by obsInfo) and one output layer (which returns the action to the environment action channel, as specified by actInfo).
Define the network as an array of layer objects.
actorNet = [
featureInputLayer(prod(obsInfo.Dimension))
fullyConnectedLayer(L)
reluLayer
fullyConnectedLayer(L)
reluLayer
fullyConnectedLayer(L)
reluLayer
fullyConnectedLayer(2)
tanhLayer
scalingLayer(Scale=[2.5;0.2618],Bias=[-0.5;0])
];Convert to dlnetwork object and display the number of weights.
actorNet = dlnetwork(actorNet); summary(actorNet)
Initialized: true
Number of learnables: 21.4k
Inputs:
1 'input' 9 features
Construct the actor similarly to the critic. For more information, see rlContinuousDeterministicActor.
actor = rlContinuousDeterministicActor(actorNet,obsInfo,actInfo);
Specify training options for the critic and the actor using rlOptimizerOptions.
criticOptions = rlOptimizerOptions( ... LearnRate=1e-3, ... GradientThreshold=1, ... L2RegularizationFactor=1e-4); actorOptions = rlOptimizerOptions( ... LearnRate=1e-4, ... GradientThreshold=1, ... L2RegularizationFactor=1e-4);
Specify the DDPG agent options using rlDDPGAgentOptions, include the options for the actor and the critic.
agentOptions = rlDDPGAgentOptions(... SampleTime=Ts,... ActorOptimizerOptions=actorOptions,... CriticOptimizerOptions=criticOptions,... ExperienceBufferLength=1e6); agentOptions.NoiseOptions.Variance = [0.6;0.1]; agentOptions.NoiseOptions.VarianceDecayRate = 1e-5;
Create the DDPG agent using the actor, the critic, and the agent options. For more information, see rlDDPGAgent.
agent = rlDDPGAgent(actor,critic,agentOptions);
Train Agent
To train the agent, first specify the training options. For this example, use the following options:
Run each training episode for at most
10000episodes, with each episode lasting at mostmaxstepstime steps.Display the training progress in the Episode Manager dialog box (set the
VerboseandPlotsoptions).Stop training when the agent receives an cumulative episode reward greater than
1700.
For more information, see rlTrainingOptions.
maxepisodes = 1e4; maxsteps = ceil(Tf/Ts); trainingOpts = rlTrainingOptions(... MaxEpisodes=maxepisodes,... MaxStepsPerEpisode=maxsteps,... Verbose=false,... Plots="training-progress",... StopTrainingCriteria="EpisodeCount",... StopTrainingValue=1450);
Train the agent using the train function. Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining = false; if doTraining % Train the agent. trainingStats = train(agent,env,trainingOpts); else % Load a pretrained agent for the example. load("SimulinkPFCDDPG.mat","agent") end

Simulate DDPG Agent
To validate the performance of the trained agent, simulate the agent within the Simulink environment by uncommenting the following commands. For more information on agent simulation, see rlSimulationOptions and sim.
% simOptions = rlSimulationOptions(MaxSteps=maxsteps); % experience = sim(env,agent,simOptions);
To demonstrate the trained agent using deterministic initial conditions, simulate the model in Simulink.
e1_initial = -0.4; e2_initial = 0.1; x0_lead = 80; sim(mdl)
The following plots show the simulation results when the lead car is 70 (m) ahead of the ego car.
In the first 35 seconds, the relative distance is greater than the safe distance (bottom-right plot), so the ego car tracks the set velocity (top-right plot). To speed up and reach the set velocity, the acceleration is mostly nonnegative (top-left plot).
From 35 to 42 seconds, the relative distance is mostly less than the safe distance (bottom-right plot), so the ego car tracks the minimum of the lead velocity and set velocity. Because the lead velocity is less than the set velocity (top-right plot), to track the lead velocity, the acceleration becomes nonzero (top-left plot).
From 42 to 58 seconds, the ego car tracks the set velocity (top-right plot) and the acceleration remains zero (top-left plot).
From 58 to 60 seconds, the relative distance becomes less than the safe distance (bottom-right plot), so the ego car slows down and tracks the lead velocity.
The bottom-left plot shows the lateral deviation. As shown in the plot, the lateral deviation is greatly decreased within 1 second. The lateral deviation remains less than 0.05 m.

Close the Simulink model.
bdclose(mdl)
Reset Function
function in = localResetFcn(in) % random value for initial position of lead car in = setVariable(in,"x0_lead",40+randi(60,1,1)); % random value for lateral deviation in = setVariable(in,"e1_initial", 0.5*(-1+2*rand)); % random value for relative yaw angle in = setVariable(in,"e2_initial", 0.1*(-1+2*rand)); end
See Also
Functions
train|sim|rlSimulinkEnv
Objects
Blocks
Related Examples
- Train DQN Agent for Lane Keeping Assist
- Train Multiple Agents for Path Following Control
- Lane Following Using Nonlinear Model Predictive Control (Model Predictive Control Toolbox)
- Lane Following Control with Sensor Fusion and Lane Detection (Model Predictive Control Toolbox)
More About
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)