Physical Modeling
Simscape™ products enable you to model, optimize, and test physical systems. Model a physical system by connecting components from mechanical, hydraulic, electric, pneumatic, and thermal domains into a network. You can also create custom components by using the Simscape language. With Simscape products, specialists in different domains can work together in a single simulation environment to optimize system-level performance and test control algorithms. You can also perform techniques such as deep learning and predictive maintenance by working with MATLAB® and Simulink®. To deploy models to other environments, including hardware-in-the-loop (HIL) systems, the Simscape products support code generation.

Products for Physical Modeling
Topics
Electronic and Mechatronic Systems
- Analyze a Simple Circuit (Simscape Electrical)
Use the Powergui block to analyze static and frequency-domain response. - Build and Simulate a Simple Circuit (Simscape Electrical)
Build a Simscape Electrical™ model and parameterize the blocks using datasheet values, run the model, and examine the results. - Modeling Analog Circuit Architectures, Mechatronic Systems, and Electrical Power Systems Using Simscape Electrical (Simscape Electrical)
Model mechatronic systems, analog circuit architectures, and single- and multi-phase electrical power systems that you can connect to networks in other Simscape domains. - Build Simple Model of Battery Pack in MATLAB and Simscape (Simscape Battery)
Create and build a Simscape system model of a battery pack with Simscape Battery™.
Fluid Systems
- Electric Vehicle Thermal Management (Simscape Fluids)
Model the thermal management system of a battery electric vehicle. - Modeling and Simulation of Fluid Networks (Simscape Fluids)
Learn the basics of constructing a model in Simscape Fluids™. - Model an Isothermal Actuation System (Simscape Fluids)
Use isothermal components to model a simple actuation system.
Robotics
- Pick and Place Robot Using Forward and Inverse Kinematics (Simscape Multibody)
Model a delta robot performing a pick and place task. - Train Humanoid Walker (Simscape Multibody)
Model a humanoid robot using Simscape Multibody™ and train it using either a genetic algorithm (which requires a Global Optimization Toolbox license) or reinforcement learning (which requires Deep Learning Toolbox™ and Reinforcement Learning Toolbox™ licenses).
Vehicles
- Capabilities of Simscape Driveline Software (Simscape Driveline)
Learn about modeling drivetrains in the Simscape Driveline™ environment. - Complete Vehicle Model (Simscape Driveline)
Explore a model that includes an engine, a transmission, and drivetrain-wheel-road coupling. - Vehicle Dynamics - Car with Heave and Roll (Simscape Multibody)
Model vehicle dynamics using a vehicle model that has 14 degrees of freedom.
Virtual Test and Design Optimization
- Aircraft Fuel Supply System with Three Tanks (Simscape Fluids)
Model an aircraft fuel supply system consisting of three tanks and an engine. - Solar Power Inverter (Simscape Electrical)
Determine the efficiency of a single-stage solar inverter. - Power-Split Hybrid Transmission (Simscape Driveline)
This example shows the basic architecture of a power-split hybrid transmission.
Model Deployment
- Electric Vehicle Configured for HIL (Simscape Electrical)
Model an electric vehicle model suitable for Hardware-In-the-Loop (HIL) deployment. - Generate HDL Code for Simscape Models (HDL Coder)
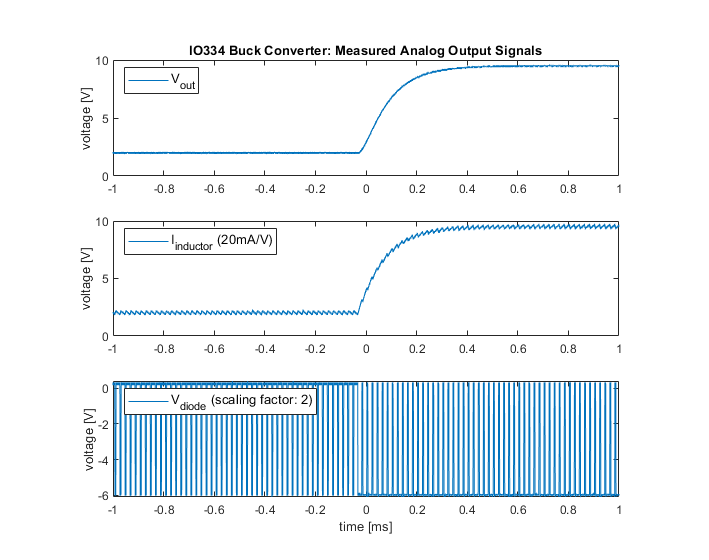
Generate HDL code from Simscape switched linear models. - Hardware-in-the-Loop Implementation of Simscape Model on Speedgoat FPGA I/O Modules (HDL Coder)
This example shows how to synthesize and generate FPGA bitstream from a Simscape™ half-wave rectifier model and download the bitstream to a Speedgoat® FPGA I/O 334-325K target for Hardware-in-the-Loop (HIL) implementation. - How Simscape Code Generation Differs from Simulink (Simscape)
Learn about Simscape code generation specifics.
Related Information
Featured Examples





You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)