MTPA Control Reference
Compute reference currents for maximum torque per ampere (MTPA) and field-weakening operation
Since R2020a
Libraries:
Motor Control Blockset /
Controls /
Control Reference
Description
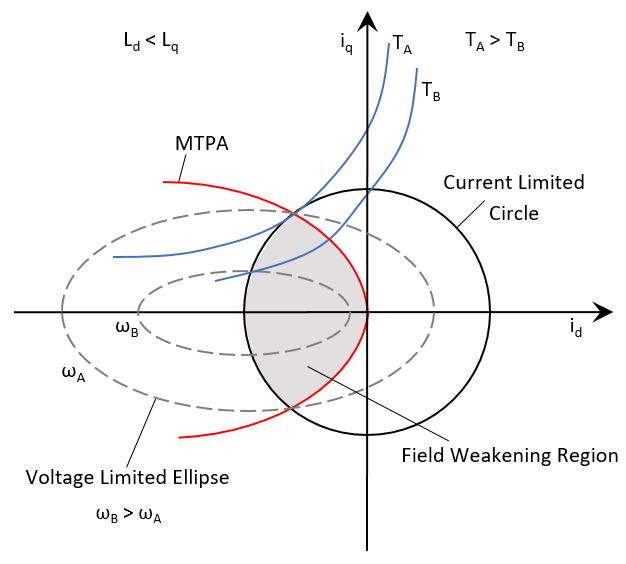
The MTPA Control Reference block computes the d-axis and q-axis reference current values for maximum torque per ampere (MTPA) and field-weakening operations. The computed reference current values result in efficient output for the permanent magnet synchronous motor (PMSM).
You can specify the reference torque and feedback mechanical speed and the block outputs the corresponding d- and q-axes reference current values for MTPA and field-weakening operations. For a given mechanical speed, in addition to the highest possible torque values, the block also supports reference torque values that are less than the rated torque of a PMSM.
The block computes the reference current values by solving mathematical relationships.
In addition, you can use the Vdc input method parameter to configure the block to accept a fixed reference DC voltage through the DC voltage (V) parameter or a variable reference DC voltage through a separate input port Vdc.
These equations describe the computation of reference d-axis and q-axis current values by the block:
Mathematical Model of PMSM
These model equations describe the dynamics of the PMSM in the rotor flux reference frame:
where:
is the d-axis voltage (volts).
is the q-axis voltage (volts).
is the d-axis current (amperes).
is the q-axis current (amperes).
is the stator phase winding resistance (ohms).
is the permanent magnet flux linkage (weber).
is the d-axis flux linkage (weber).
is the q-axis flux linkage (weber).
is the electrical speed corresponding to frequency of stator voltages (radians/ sec).
is the rotor mechanical speed (radians/ sec).
is the d-axis winding inductance (henry).
is the q-axis winding inductance (henry).
is the electromechanical torque produced by the PMSM (Nm).
is the load torque (Nm).
is the number of motor pole pairs.
is the inertia coefficient (kg-m2).
is the friction coefficient (kg-m2/ sec).
Base Speed
Base speed is the maximum motor speed at the rated voltage and rated load, outside the field-weakening region. These equations describe the computation of the motor base speed.
The inverter voltage constraint is defined by computing the d-axis and q-axis voltages:
The current limit circle defines the current constraint which can be considered as:
In the preceding equation, is zero for surface PMSMs. For interior PMSMs, the block considers values of and corresponding to MTPA.
Using these equations, we can compute the base speed as:
where:
is the electrical speed corresponding to frequency of stator voltages (radians/ sec).
is the mechanical base speed of the motor (radians/ sec).
is the d-axis current (amperes).
is the q-axis current (amperes).
is the d-axis voltage when is zero (volts).
is the q-axis voltage when is zero (volts).
is the d-axis winding inductance (henry).
is the q-axis winding inductance (henry).
is the stator phase winding resistance (ohms).
is the permanent magnet flux linkage (weber).
is the d-axis voltage (volts).
is the q-axis voltage (volts).
is the maximum fundamental line to neutral voltage (peak) supplied to the motor (volts).
is the dc voltage supplied to the inverter (volts).
is the maximum phase current (peak) of the motor (amperes).
is the number of motor pole pairs.
Surface PMSM
For a surface PMSM, you can achieve maximum torque by using zero d-axis current when the motor is below the base speed. For the field-weakening operation, the block calculates the reference d-axis current using the constant-voltage-constant-power control (CVCP) algorithm defined by these equations:
If :
If :
The saturation function to compute is:
If ,
If ,
If ,
The block outputs these values:
where:
is the electrical speed corresponding to frequency of stator voltages (radians/ sec).
is the rotor mechanical speed (radians/ sec).
is the mechanical base speed of the motor (radians/ sec).
is the electrical base speed of the motor (radians/ sec).
is the d-axis phase current corresponding to MTPA (amperes).
is the q-axis phase current corresponding to MTPA (amperes).
is the reference torque (Nm).
is the number of motor pole pairs.
is the permanent magnet flux linkage (weber).
is the d-axis field weakening current (amperes).
is the q-axis field weakening current (amperes).
is the d-axis winding inductance (henry).
is the maximum phase current (peak) of the motor (amperes).
is the d-axis saturation current (amperes).
is the q-axis saturation current (amperes).
is the d-axis current corresponding to the reference torque and reference speed (amperes).
is the q-axis current corresponding to the reference torque and reference speed (amperes).
Interior PMSM
For an interior PMSM, you can achieve maximum torque by computing the d-axis and q-axis reference currents from the torque equation. For the field-weakening operation, the block computes the reference d-axis current using the voltage and current limited maximum torque control (VCLMT) algorithm.
The reference currents for MTPA and field-weakening operations are defined by these equations:
These two equations describe the computation of field-weakening currents for maximum possible torque corresponding to a given speed value:
These two equations describe the computation of field-weakening currents for a given speed and torque value.
To reduce the computation time, the block uses approximations to solve the preceding polynomial.
If ,
If ,
If ,
If ,
For negative reference torque values, the block updates the sign of and and modifies the equations accordingly.
where:
is the estimated maximum current to produce the reference torque (amperes).
is the saturated value of estimated maximum current (amperes).
is the maximum d-axis phase current (peak) (amperes).
is the maximum q-axis phase current (peak) (amperes).
is the reference torque (Nm).
is the d-axis current component corresponding to the reference torque and reference speed (amperes).
is the q-axis current component corresponding to the reference torque and reference speed (amperes).
is the number of motor pole pairs.
is the permanent magnet flux linkage (weber).
is the d-axis phase current corresponding to MTPA (amperes).
is the q-axis phase current corresponding to MTPA (amperes).
is the d-axis winding inductance (henry).
is the q-axis winding inductance (henry).
is the maximum phase current (peak) of the motor (amperes).
is the maximum fundamental line to neutral voltage (peak) supplied to the motor (volts).
is the d-axis voltage when is zero (volts).
is the q-axis voltage when is zero (volts).
is the electrical speed corresponding to frequency of stator voltages (radians/ sec).
is the d-axis current (amperes).
is the q-axis current (amperes).
is the d-axis field weakening current (amperes).
is the q-axis field weakening current (amperes).
is the mechanical base speed of the motor (radians/ sec).
Ports
Input
Output
Parameters
References
[1] B. Bose, Modern Power Electronics and AC Drives. Prentice Hall, 2001. ISBN-0-13-016743-6.
[2] Morimoto, Shigeo, Masayuka Sanada, and Yoji Takeda. "Wide-speed operation of interior permanent magnet synchronous motors with high-performance current regulator." IEEE Transactions on Industry Applications, Vol. 30, Issue 4, July/August 1994, pp. 920-926.
[3] Li, Muyang. "Flux-Weakening Control for Permanent-Magnet Synchronous Motors Based on Z-Source Inverters." Master's Thesis, Marquette University, e-Publications@Marquette, Fall 2014.
[4] Briz, Fernando, Michael W. Degner, and Robert D. Lorenz. "Analysis and design of current regulators using complex vectors." IEEE Transactions on Industry Applications, Vol. 36, Issue 3, May/June 2000, pp. 817-825.
[5] Lorenz, Robert D., Thomas Lipo, and Donald W. Novotny. "Motion control with induction motors." Proceedings of the IEEE, Vol. 82, Issue 8, August 1994, pp. 1215-1240.
[6] Briz, Fernando, et al. "Current and flux regulation in field-weakening operation [of induction motors]." IEEE Transactions on Industry Applications, Vol. 37, Issue 1, Jan/Feb 2001, pp. 42-50.
[7] TI Application Note, "Sensorless-FOC With Flux-Weakening and MTPA for IPMSM Motor Drives."
[8] Haque, M. E., L. Zhong, and M. F. Rahman. "Improved trajectory control for an interior permanent magnet synchronous motor drive with extended operating limit." Journal of Electrical & Electronics Engineering. Vol. 22, Number 1, 2003, p. 49.
Extended Capabilities
Version History
Introduced in R2020a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)