Pole and Zero Locations
This example shows how to examine the pole and zero locations of dynamic systems both graphically using pzplot and numerically using pole and zero.
Examining the pole and zero locations can be useful for tasks such as stability analysis or identifying near-canceling pole-zero pairs for model simplification. This example compares two closed-loop systems that have the same plant and different controllers.
Create dynamic system models representing the two closed-loop systems.
G = zpk([],[-5 -5 -10],100); C1 = pid(2.9,7.1); CL1 = feedback(G*C1,1); C2 = pid(29,7.1); CL2 = feedback(G*C2,1);
The controller C2 has a much higher proportional gain. Otherwise, the two closed-loop systems CL1 and CL2 are the same.
Graphically examine the pole and zero locations of CL1 and CL2.
pzplot(CL1,CL2) grid
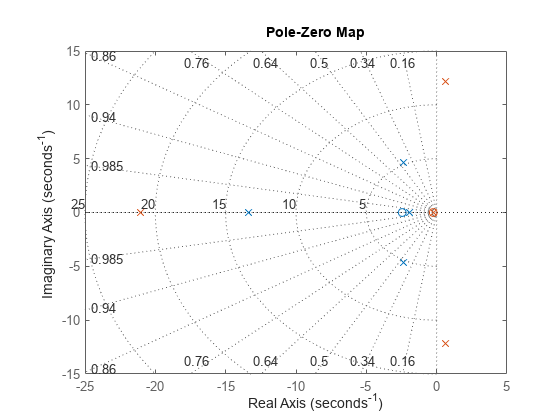
pzplot plots pole and zero locations on the complex plane as x and o marks, respectively. When you provide multiple models, pzplot plots the poles and zeros of each model in a different color. Here, there poles and zeros of CL1 are blue, and those of CL2 are green.
The plot shows that all poles of CL1 are in the left half-plane, and therefore CL1 is stable. From the radial grid markings on the plot, you can read that the damping of the oscillating (complex) poles is approximately 0.45. The plot also shows that CL2 contains poles in the right half-plane and is therefore unstable.
Compute numerical values of the pole and zero locations of CL2.
z = zero(CL2); p = pole(CL2);
zero and pole return column vectors containing the zero and pole locations of the system.
See Also
Related Examples
More About
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)