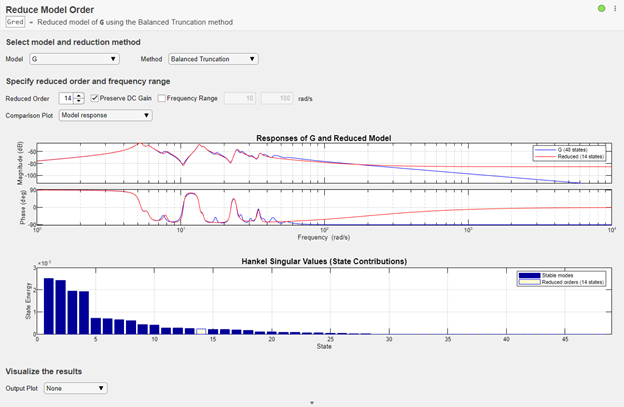
Reduce Model Order
Reduce complexity of linear time-invariant (LTI) models in the Live Editor
Since R2019b

Open the Task
To add the Reduce Model Order task to a live script in the MATLAB Editor:
On the Live Editor tab, select Task > Reduce Model Order.
In a code block in your script, type a relevant keyword, such as
reduce,balred, orminreal. SelectReduce Model Orderfrom the suggested command completions.
Parameters
Version History
Introduced in R2019bYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)