Implement the latest standards for high-resolution and short-range localization and ranging
Ultra-wideband (UWB) is the most widely used wireless standard for high-resolution and short-range localization and ranging along with data communication. UWB is a pulse radio technology with a minimum bandwidth of 500 MHz, operating within both sub-GHz and 3.1–10.6 GHz ranges.
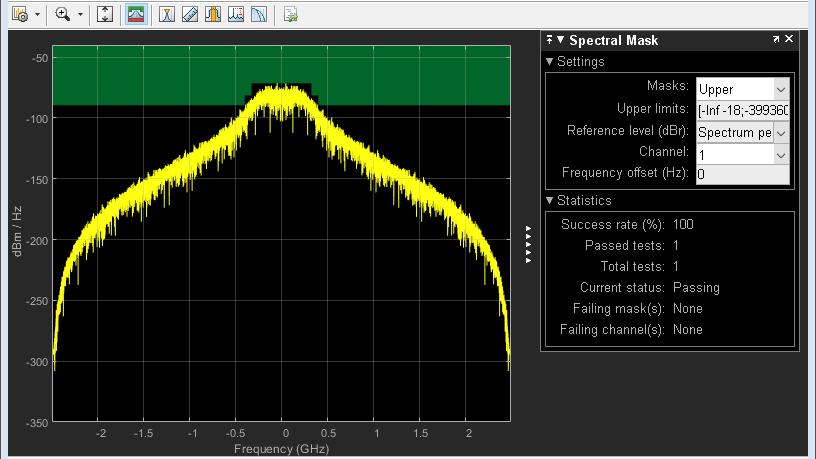
UWB also has a maximum power spectral density of -41.3 dBm/MHz across all frequencies, which is much less than WiFi, Bluetooth®, Zigbee®, and GPS and avoids interference with these wireless signals to support short-range communication. Ultra-wideband uses a short pulse (< 2 ns) for transmission that makes it immune to multipath fading and supports location and ranging applications.
Other applications supported by UWB are:
- Secure access control
- Secure wireless payments
- Wireless health sensors
- Device-to-device communication
Some UWB characteristics that enable these features are:
- Bandwidth range: 500 MHz to 1.3 GHz; pulse duration: < 2 ns
- Scrambled timestamp sequence (STS) for secure communication
- Mean pulse repetition frequency (PRF) from 3.9 MHz to 249.6 MHz for different channel conditions, and a peak PRF of 499.2 MHz
- Custom modulation schemes and guard intervals to avoid interference and multipath effects
- Single error correction and double error detection (SECDED) coding for the preamble, and Reed-Solomon coding for payload, with a convolutional code of ½ rate and a constraint length of 3 or 7
UWB with MATLAB
You can use the MATLAB® Communications Toolbox™ for Zigbee® and UWB Library to implement and test UWB features with reference examples shipped as open MATLAB code. You can use MATLAB to implement the latest ultra-wideband amendment (15.4z), or the previous 15.4a. You can also use MATLAB to simulate various localization and ranging algorithms using UWB waveform generation, end-to-end UWB transceiver simulation, and localization and ranging examples.
UWB Specifications
Ultra-wideband specifications were first proposed in amendment 15.4a of IEEE standard 802.15.4a. This amendment specifies the high-rate pulse repetition frequency (HRP) physical layer (PHY), and the low-rate pulse repetition frequency (LRP) PHY was then introduced in amendment 15.4f. The latest enhancement was proposed in amendment 15.4z, which adds modes for enhanced ranging capable device and security features to existing HRP here and LRP-PHYs.
MATLAB provides examples that implement the following modes:
- Base pulse repetition frequency (BPRF), where the mean PRF is 62.4 MHz
- High pulse repetition frequency (HPRF), where the mean PRF is either 124.8 MHz or 249.6 MHz
The scrambled timestamp sequence (STS) field is a security feature introduced by IEEE standard 802.15.4z to enhance data integrity. Transmission of the STS field is optional for the BRPF and HPRF modes.
Figure 1 shows the symbol and modulation scheme for 802.15.4a. The systematic bit of the convolutional coder is used to identify one of the two possible burst position modulation intervals (TBPM). The transmission can happen only in the first or third quarters. After spreading by NCPB (chips per burst), the parity bit is used to modulate the ultra-wideband pulses with binary phase shift keying (BPSK). The burst position is identified using an integer value constructed from the spreading sequence. Every transmission is padded by a guard interval. The MATLAB example HRP UWB IEEE 802.15.4a/z Waveform Generation models these aspects of the signal.
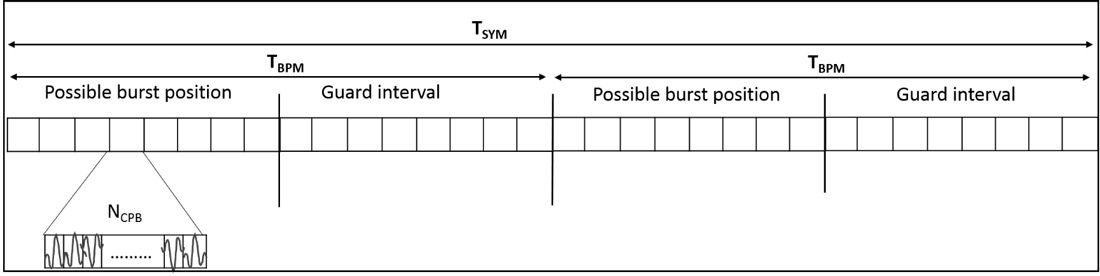
Figure 1. Identifying burst position modulation and BPSK in IEEE standard 802.15.4a.
Table 1 compares the UWB amendments of IEEE standard 802.15.4.
| UWB amendments | Data rate | Band (GHz) | Modulation | Use cases |
|---|---|---|---|---|
| 15.4a | <27 Mbps | <1 & 3.1 to 10.6 | Burst position modulation (BPM) and BPSK | Home and industrial automation, ranging |
| 15.4f | <1 Mbps | <1 & 6.3 to 9.2 | Pulse Position Modulation (PPM), On Off Keying (OOK) | Ranging, active radiofrequency identification (RFID), and energy-efficient Internet of Things (IoT) applications |
| 15.4z | <27 Mbps | <1 & 3.1 to 10.6 | Combination of spreading. BPSK, and guard intervals | Hands-free access control, location-based services, and peer-to-peer communication |
Table 1. UWB standards.
UWB Transceiver
Figure 2 shows a UWB transceiver. The transmitter chain consists of a PHY header that contains information such as data rate, frame length, and preamble duration. The PHY header is encoded by SECDED. Payload received by the upper layer is encoded using Reed-Solomon encoding. Standard 802.15.4z adds an optional STS field for data integrity. Another block of the convolutional encoder of rate ½ and a constraint length of 3 or 7 encodes the concatenated bitstream before conversion to complex symbols by a symbol mapper, which also spreads bits using a spreading sequence and chip length. After pulse shaping, the ultra-wideband signal is transmitted over the air. You can find an implementation of these steps at HRP UWB IEEE 802.15.4a/z Waveform Generation.
The UWB receiver is a simple energy detector, implemented as a mirror image of the transmitter with the first block as an integrate-and-dump filter. You can find the complete transceiver implementation at the End-to-End Simulation of HRP UWB IEEE 802.15.4a/z PHY.
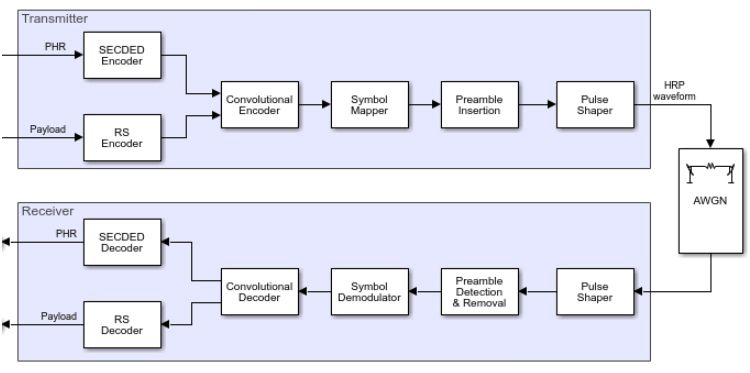
Figure 2. Using the UWB transceiver.
UWB Localization and Ranging
MATLAB supports localization and ranging techniques using media access control (MAC) and PHY frames compatible with the IEEE 802.15.4 standard and the IEEE 802.15.4z amendment. Three widely implemented ranging techniques are:
- Single-sided two-way ranging (SS-TWR): One device estimates the distance between two devices using frame transmission in both directions of a wireless 802.15.4z link
- Double-sided two-way ranging (DS-TWR): Both devices estimate the distance between the two devices using frame transmission in both directions of a wireless 802.15.4z link
- One-way ranging/time difference of arrival (OWR/TDOA): Network-assisted localization whereby one device communicates with a set of synchronized nodes to estimate the position of the device
You can find MATLAB examples of SS-TWR at UWB Ranging Using IEEE 802.15.4z, and of OWR/TDOA at UWB Localization Using IEEE 802.15.4z.
In OWR/TDOA, the device to be localized periodically broadcasts short messages referred to as blinks. The TDOA between the periodic messages places the device in one hyperbolic surface for each pair of synchronized nodes. The intersection of all hyperbolic surfaces (over every pair of synchronized nodes) gives the location estimate for the device.
Figure 3 shows the results of an OWR/TDOA simulation in MATLAB.
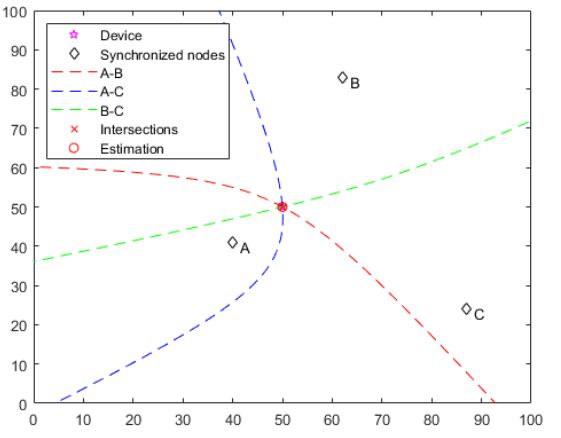
Figure 3. Viewing the simulation results of OWR/TDOA localization in MATLAB.
Why Is UWB Important?
- UWB provides an alternative physical layer for personal and body area networks that mainly functions in the 3.1 to 10.6 GHz range, which is less congested than the ISM (industrial, scientific and medical) band
- UWB has low susceptibility to multipath fading, can work with low signal-to-noise ratios, and provides additional support for secure communications
- Compared to a super-heterodyne transceiver architecture, UWB offers system simplicity, and the small antenna enabled by the high frequency can be fabricated inside chips
- The UWB pulse duration is much shorter than the symbol times of other technologies, supporting high accuracy and low latency in ranging and localization, as shown in Table 2
| Technology | UWB | Bluetooth | WiFi | RFID | GPS | 5G |
|---|---|---|---|---|---|---|
| Accuracy | 1 cm | 1–5 m | 5–15 m | 1 m | 5–20 m | 10 m |
| Latency | < 1 ms | > 3 s | > 3 s | 1 s | 100 ms | < 1 s |
Table 2. Comparing technologies used for ranging and localization.
Examples and How To
Software Reference
See also: wireless communications, channel model, wireless transceiver, RF system, Communications Toolbox, What Is Bluetooth LE?
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)